Download presentation
Presentation is loading. Please wait.

1
エージェントアプローチ 人工知能 1章・2章 M0 片渕 聡 08/07/02

2
目次 第1章:序論 第2章:知的エージェント

3
第1章:序論 目次 研究の背景 AIへのアプローチ 人工知能の基盤 人工知能に関する最新技術 1章まとめ
-人間のように行動する(チューリングテストアプローチ) -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤 人工知能に関する最新技術 1章まとめ
 -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤. 人工知能に関する最新技術. 1章まとめ.")
4
第1章:序論 目次 研究の背景 AIへのアプローチ 人工知能の基盤 人工知能に関する最新技術 1章まとめ
-人間のように行動する(チューリングテストアプローチ) -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤 人工知能に関する最新技術 1章まとめ
 -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤. 人工知能に関する最新技術. 1章まとめ.")
5
研究の背景 人間のような知的存在の理解・構築 -定義すら未だ曖昧な段階 -人類文明に大きな影響を与える 非常に興味深い分野
-定義すら未だ曖昧な段階 -人類文明に大きな影響を与える 非常に興味深い分野 現在のAI分野の領域 -汎用領域(認識、論理的推論) -下位(専用)領域(チェス、病気診断etc)
 -下位(専用)領域(チェス、病気診断etc)")
6
第1章:序論 目次 研究の背景 AIへのアプローチ 人工知能の基盤 人工知能に関する最新技術 1章まとめ
-人間のように行動する(チューリングテストアプローチ) -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤 人工知能に関する最新技術 1章まとめ
 -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤. 人工知能に関する最新技術. 1章まとめ.")
7
AIのアプローチのカテゴリ分類 ・分岐1:思考に興味あるか行動に興味があるか ・分岐2:モデルの基準が人間か理想像か 人間のように
考えるシステム 合理的に 行動するシステム 行動する結果だけに興味がある 考える結果を導く過程にも興味がある

8
合理的とは 過ちを犯さないこと(⇔人間的) -例えば人間はいくら試験勉強をしても試験でミスを犯すことがある
-例えば人間はいくら試験勉強をしても試験でミスを犯すことがある 合理的であっても全能というわけではない -例えば道路を渡る際いくら安全確認をしても突然隕石が直撃することは予測できない

9
チューリングテストアプローチ (人間のように行動する)
ある計算機に知能があるのかを検証 1.質問者(人間)と質問のやりとりをする 2.質問者が人間か機械かを判別できなければ合格 ※質問者は物理的に機械を確認することは出来ない 質問者(人間) 回答者(機械) 相手は 人間?機械? いかにして この目標を達成するかの 研究が進められている
と質問のやりとりをする. 2.質問者が人間か機械かを判別できなければ合格. ※質問者は物理的に機械を確認することは出来ない. 質問者(人間) 回答者(機械) 相手は. 人間?機械? いかにして. この目標を達成するかの. 研究が進められている.")
10
チューリングテストの成功 必要な(になるであろう)技術
自然言語処理 -日本語や英語を理解、処理する技術 知識表現 -今までに得た情報を格納する技術 自動推論 -蓄えられた情報を元に結論を導き出す技術 機械学習 -解析したデータを元にパターンを検出する技術

11
統合チューリングテスト 現実には物理環境を考慮する必要がある -視覚認識(機械が物体を認識するために必要)
-視覚認識(機械が物体を認識するために必要) -ロボット工学(物体を操作するために必要) 人間 機械 答えは これですね
 -ロボット工学(物体を操作するために必要) 人間. 機械. 答えは. これですね.")
12
認知モデルアプローチ (人間のように考える)
人間がどのように考えているのかを知る -内省 -心理実験 認知科学 -AIの計算機モデルと心理学の融合 人間の心理の理論的な構築を目指す

13
思考の法則によるアプローチ (合理的に考える)
「正しい思考」(反駁不可能な推論)の体系化 -思考の法則が心理を支配するという考え方 三段論法 鈴木君は 人間だ 全ての人間は いつか死ぬ 鈴木君は いつか死ぬ 形式論証によるアプローチ ↓ 論理主義アプローチ
の体系化. -思考の法則が心理を支配するという考え方. 三段論法. 鈴木君は. 人間だ. 全ての人間は. いつか死ぬ. 鈴木君は. いつか死ぬ. 形式論証によるアプローチ. ↓ 論理主義アプローチ.")
14
論理主義アプローチへの障害 厳密に規定されていない知識の形式化が困難 -現在の論理式では全ての知識をカバーできない
-現在の論理式では全ての知識をカバーできない 論理的な問題と現実問題に大きな隔たりがある -机上の空論になる可能性がある -事実がわかってもその組合わせ方がわからない ・事実A,B,Cがあったとしてそれらをどう組み合わせる?

15
合理エージェントアプローチ (合理的に行動する)
自己の信念を元に目標達成のために行動する ・チューリングテスト+推論 -「思考の法則」アプローチと比べ一般的 -チューリングテストと比べ判断基準が明確 (人間の特殊な環境を考慮するのは今はまだ早い) 本書では合理的アプローチを主に扱う
 本書では合理的アプローチを主に扱う.")
16
第1章:序論 目次 研究の背景 AIへのアプローチ 人工知能の基盤 人工知能に関する最新技術 1章まとめ
-人間のように行動する(チューリングテストアプローチ) -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤 人工知能に関する最新技術 1章まとめ
 -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤. 人工知能に関する最新技術. 1章まとめ.")
17
人工知能の基盤 AIは様々な分野の概念や技術を継承している -哲学(唯物論) -数学(アルゴリズム) -心理学(行動主義、認知心理学)
-哲学(唯物論) -数学(アルゴリズム) -心理学(行動主義、認知心理学) -計算機技術(プログラム言語、OS) -言語学(計算言語学問、自然言語処理) AIの 概念 AIの 実装
 -数学(アルゴリズム) -心理学(行動主義、認知心理学) -計算機技術(プログラム言語、OS) -言語学(計算言語学問、自然言語処理) AIの. 概念. AIの. 実装.")
18
第1章:序論 目次 研究の背景 AIへのアプローチ 人工知能の基盤 人工知能に関する最新技術 1章まとめ
-人間のように行動する(チューリングテストアプローチ) -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤 人工知能に関する最新技術 1章まとめ
 -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤. 人工知能に関する最新技術. 1章まとめ.")
19
人工知能に関する最新(?)技術 チェス世界チャンピオンを打ち破るプログラム(1989)
音声認識のミスを対話の成り行きの理解で修正する対話プログラム(1994) 宇宙船からの膨大なデータを処理し、重大な問題をアナリストに知らせるシステム(1992) 自律走行システム(1993) などなど・・・
 宇宙船からの膨大なデータを処理し、重大な問題をアナリストに知らせるシステム(1992) 自律走行システム(1993) などなど・・・")
20
第1章:序論 目次 研究の背景 AIへのアプローチ 人工知能の基盤 人工知能に関する最新技術 1章まとめ
-人間のように行動する(チューリングテストアプローチ) -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤 人工知能に関する最新技術 1章まとめ
 -人間のように考えるシステム(認知モデルアプローチ) -合理的に考える(思考の法則によるアプローチ) -合理的に行動する(合理エージェントアプローチ) 人工知能の基盤. 人工知能に関する最新技術. 1章まとめ.")
21
1章まとめ AIへのアプローチは様々である -興味は思考or行動 -モデルは人間or合理性 AIは様々な分野の概念や技術を継承

22
ここまでが1章です ここから2章になります

23
第2章:知的エージェント 目次 知的エージェントとは 理想的な合理的エージェント 理想的マッピング 知的エージェントの構造
エージェントプログラム 環境の特徴 まとめ

24
第2章:知的エージェント 目次 知的エージェントとは 理想的な合理的エージェント 理想的マッピング 知的エージェントの構造
エージェントプログラム 環境の特徴 まとめ

25
知的エージェントとは 環境をセンサで知覚 環境に対して手足(エフェクタ)を介して動作 センサ 環境 処理 エフェクタ エージェント
を介して動作 センサ 環境 処理 エフェクタ エージェント")
26
第2章:知的エージェント 目次 知的エージェントとは 理想的な合理的エージェント 理想的マッピング 知的エージェントの構造
エージェントプログラム 環境の特徴 まとめ

27
合理的とは(再掲) 過ちを犯さないこと(⇔人間的) -例えば人間はいくら試験勉強をしても試験でミスを犯すことがある
-例えば人間はいくら試験勉強をしても試験でミスを犯すことがある 合理的であっても全能というわけではない -例えば道路を渡る際いくら安全確認をしても突然隕石が直撃することは予測できない

28
性能尺度・知覚列 性能尺度 エージェントのどれくらい正しく動作するかを 評価する基準 例:道路を渡る前に左右を見渡すと性能尺度は上昇 知覚列
エージェントのどれくらい正しく動作するかを 評価する基準 例:道路を渡る前に左右を見渡すと性能尺度は上昇 -全てのエージェントに適用できる基準はない 知覚列 エージェントが知覚した全ての情報の履歴

29
組込み知識・自律性 組込み知識 人間によって予めエージェントに組み込まれている知識 自律性
人間によって予めエージェントに組み込まれている知識 自律性 組込み知識に基づかずエージェント自身の経験に基づいて行動すること -自律性に欠けるエージェントは適応性にも欠ける

30
理想的な合理的エージェント 知覚列とエージェント自身の持つ組込み知識に基づいて性能尺度を最大にする動作を選ぶ エージェント
エージェント 例:道路を渡るエージェントの場合 -安全を確認するため左右を見渡すetc 環境に関して知っていることも合理性には重要

31
第2章:知的エージェント 目次 知的エージェントとは 理想的な合理的エージェント 理想的マッピング 知的エージェントの構造
エージェントプログラム 環境の特徴 まとめ

32
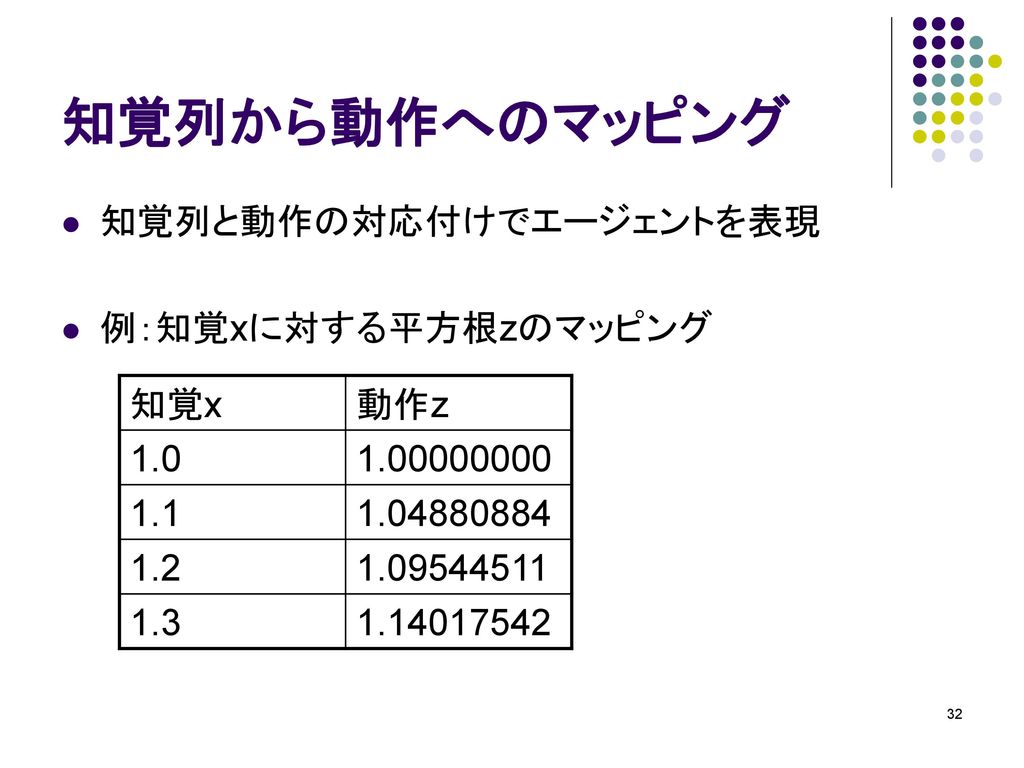
知覚列から動作へのマッピング 知覚列と動作の対応付けでエージェントを表現 例:知覚xに対する平方根zのマッピング 知覚x 動作z 1.0
1.1 1.2 1.3
33
理想的マッピング どんな知覚列に対しても、それに応じてエージェントが取るべき動作を特定できるマッピング 先ほどの平方根の例も理想的マッピング
知覚x 動作z 1.0 1.1 1.2 1.3

34
第2章:知的エージェント 目次 知的エージェントとは 理想的な合理的エージェント 理想的マッピング 知的エージェントの構造
エージェントプログラム 環境の特徴 まとめ

35
知的エージェントの構造 エージェント=プログラム+アーキテクチャ ※(エージェント)プログラム 知覚から動作へマッピングする関数を設計
知覚から動作へマッピングする関数を設計 ※アーキテクチャ プログラムを受け入れ実行する計算装置

36
第2章:知的エージェント 目次 知的エージェントとは 理想的な合理的エージェント 理想的マッピング 知的エージェントの構造
エージェントプログラム 環境の特徴 まとめ

37
エージェントプログラム 骨格プログラム 新たに知覚を得ると内部情報を更新(記憶) 知覚に基づき最良の動作を選択(マッピング)
選択した動作の情報も内部に記憶

38
エージェントのタイプ エージェントは以下の4つの要素に依存 -知覚(P) -動作(A) -ゴール(G) -環境(E)
性質に応じたプログラムを用いる必要がある

39
エージェントプログラムの種類 単純反射エージェント 内部状態を持つエージェント ゴール主導エージェント 効用主導エージェント 単純 低信頼
複雑 高信頼

40
単純反射エージェント 現在の状態に適合するルールを見つけてそのルールに見合う動作を行う -例:前の車が減速したブレーキを踏む
-例:前の車が減速したブレーキを踏む 現実世界においては適用できる範囲が狭い 条件(IF)-動作(THEN)ルール
-動作(THEN)ルール.")
41
単純反射エージェントの構造 環境 Agent Sensor 現在の環境状態 IF-THENルール 最善の動作選択 Effectors

42
内部状態を持つ反射エージェント 環境の状態を用いることで単純反射と比べて適用範囲を広げる -時間と共に内部状態は更新される
-時間と共に内部状態は更新される 例:車線変更の場合 -「信号が見えた車線変更する」では不十分 -「近くに車が無いか」という状態を保持 -その状態も考慮した上で車線変更するかを決定

43
内部状態を持つ反射エージェントの構造 環境 Agent Sensor 内部状態 現在の環境状態 IF-THENルール 最善の動作選択
Effectors

44
ゴール主導エージェント エージェントにはゴールに関する情報が必要 -例えば移動方向は目的地に依存する
-例えば移動方向は目的地に依存する 探索やプラニングにより動作を決定(3章以降) 未来に関する考慮を含む(IF-THENルールとの相違) -「もしこの動作をしたら何が起きるのだろうか」 柔軟性・適応性が高い
 未来に関する考慮を含む(IF-THENルールとの相違) -「もしこの動作をしたら何が起きるのだろうか」 柔軟性・適応性が高い.")
45
ゴール主導エージェントの構造 環境 Agent Sensor 内部状態 現在の環境状態 未来への考慮 ゴール 最善の動作選択
Effectors

46
効用主導エージェント より性能尺度の高い動作列を決定するために 効用関数を用いる
より性能尺度の高い動作列を決定するために 効用関数を用いる ※矛盾する目標(e.g.消費電力vs精度)がある時は適切なトレードオフを指定する ※確実に目標を達成する動作列が存在しない時、達成見込みを重み付けする方法をとる
がある時は適切なトレードオフを指定する. ※確実に目標を達成する動作列が存在しない時、達成見込みを重み付けする方法をとる.")
47
効用主導エージェントの構造 環境 Agent Sensor 内部状態 現在の環境状態 未来への考慮 効用関数 効用の度合い 最善の動作選択
Effectors

48
第2章:知的エージェント 目次 知的エージェントとは 理想的な合理的エージェント 理想的マッピング 知的エージェントの構造
エージェントプログラム 環境の特徴 まとめ

49
環境の分類基準(1/2) 環境は幾つかの種類に分類可能 アクセス可能 vs アクセス不能 -センサが環境全体を見渡せるかどうか
-センサが環境全体を見渡せるかどうか 例:チェスは盤上(環境)を見渡せるのでアクセス可能 決定的 vs 非決定的 -環境の次の状態が現在の状態からの動作の選択によって確定できるかどうか 例:将棋は手によって次の環境が特定できるので決定的
を見渡せるのでアクセス可能. 決定的 vs 非決定的. -環境の次の状態が現在の状態からの動作の選択によって確定できるかどうか. 例:将棋は手によって次の環境が特定できるので決定的")
50
環境の分類基準(2/2) エピソード的 vs 非エピソード的 -前の動作が次の選択に影響を与えないかどうか
-前の動作が次の選択に影響を与えないかどうか 例:チェスは前の手が次の手に影響を与えるので非エピソード的 静的 vs 動的 -エージェントの思考中に環境が変化しないかするか 例:チェスは手を決めるまで環境が変わらないので静的 離散的 vs 連続的 -知覚と動作が有限個に区別できるかどうか 例:チェスは各手ごとに有限個の選択しかないから離散的

51
環境とその特徴の例 アクセス不能、非決定的、非エピソード的 動的、連続的な環境は複雑
現在の研究のほとんどがこの複雑な環境を想定しているらしい アクセス不能、非決定的、非エピソード的 動的、連続的な環境は複雑

52
環境(シミュレータ)プログラム 環境と動作を結びつけるプログラム 各エージェントに知覚を与える エージェントから動作を受け取り環境を更新
プログラム 環境と動作を結びつけるプログラム 各エージェントに知覚を与える エージェントから動作を受け取り環境を更新")
53
第2章:知的エージェント 目次 知的エージェントとは 理想的な合理的エージェント 理想的マッピング 知的エージェントの構造
エージェントプログラム 環境の特徴 まとめ

54
2章まとめ エージェントはセンサで知覚してエフェクタで環境に働きかける エージェント=プログラム+アーキテクチャ
エージェントプログラムでは内部情報を更新しつつ知覚から動作にマッピングする関数を設計 エージェントは知覚、動作、ゴール、環境に依存 アクセス不能、非決定的、非エピソード的、動的、連続的な環境は複雑

55
第1章:序論(2+1)(13+5+1) 目次 研究の背景(1) AIへのアプローチ(2) 人工知能の基盤(1)
-人間のように行動する(チューリングテストアプローチ)(3) -人間のように考えるシステム(認知モデルアプローチ)(1) -合理的に考える(思考の法則によるアプローチ)(2) -合理的に行動する(合理エージェントアプローチ)(1) 人工知能の基盤(1) 人工知能に関する最新技術(1) 1章まとめ(1)
(3) -人間のように考えるシステム(認知モデルアプローチ)(1) -合理的に考える(思考の法則によるアプローチ)(2) -合理的に行動する(合理エージェントアプローチ)(1) 人工知能の基盤(1) 人工知能に関する最新技術(1) 1章まとめ(1)")
56
第2章:知的エージェント 目次(24+7+1) 知的エージェントとは(1) 理想的な合理的エージェント(4) 理想的マッピング(2)
知的エージェントの構造(1) エージェントプログラム(11) 環境の特徴(4) 2章まとめ(1)
 エージェントプログラム(11) 環境の特徴(4) 2章まとめ(1)")
Similar presentations



 情報工学科 木村昌臣 篠埜 功.>")




![執筆者:市川伸一 授業者:寺尾 敦 atsushi [at] si.aoyama.ac.jp](/61/11418793/big_thumb.jpg "執筆者:市川伸一 授業者:寺尾 敦 atsushi [at] si.aoyama.ac.jp>")





 2016年度.>")


 協調機械システム論 東京大学 人工物工学研究センター 淺間 一.>")

