Download presentation
Presentation is loading. Please wait.

1
Rikkyo University Murata.lab / RIKEN Rikkyo University Murata.lab / RIKEN Master course 2nd Kentaro Watanbe Kentaro Watanbe Murata.Lab 2012 Last Group Meeting Correlation signal OASys to Zero field 1

2
2 OASys の理想と現実 時々刻々と変化するチェンバーの変形 を捉えトラッキングに補正を加える。 OASys パラメーター の DAQ OASYS パラメター から MuTr の変形・ 変位をモデリング Alignment パラメーターの算 出 モデリングの困難 ・相対位置の縛り ・剛体仮定 ・ z 軸のパラメーター モデリングの困難 ・ zero field run ・ j/ ψ→ 2 μ ・他の測定 OASys project Run9 より再稼働 『 OASys というディバイス が本当にチェンバーの動き をトレース出来ているのか。 つまり、 OASys の変動とい うものは真にチェンバーの 動きによるものか?』 と いう事を確認した人は、未 だいない。。 Zero field から算出される チェンバーの動きとと OASys の動きとの相関を見 る事でそれを確認したい! W 分解能 向上 !! 測量にて計測。

3
3 ① ⑤ ④ ③ ② ⑦ ⑥ half octant motivation : What is OASys signal ?? OASys を評価するためには OASys とは独立した機構により、その評価を行わな ければならない。今回は、その指標として Zero field run に置けるストレートト ラックを用いる。 更に、モデリングなどの複雑な過程を踏まえずにカメラの動きをダイレクトに トラックのデータと比べる。トラックは主にインナー付近に分布する事から、 ファーストステップとして 各 half octant の動きをインナー部のカメラと比べる。

4
South Arm

5
5 South Arm track map March Zero field South Arm track map May Zero field Run9 South Arm Conditions ・ octant 7 half 1

7
South Arm : the movement of Zero field mean & OASys dead octant Octant 7-1 dead octant Octant 4-2 ↑ it seems to be healthy tracks South Arm に関しては dead octant (oct 7-1) を除くと、その変位は 80日間で OASys 、 Zero field 共に ±200 μ m である。 この中に相関があるかどうかを評価し たい。
 を除くと、その変位は 80日間で OASys 、 Zero field 共に ±200 μ m である。 この中に相関があるかどうかを評価し たい。")
8
South Arm : the movement of Zero field mean & OASys Almost half octant ID is 1 Almost half octant ID is 2 ① ⑤ ④ ③ ② ⑦ ⑥ half octant しかし、大事な点は OASys と Zero field の間に相関があるかど うか?

9
South Arm : the movement of Zero field mean & OASys South Arm に関して言える事。 ・ Zero field, OASys 共に ± 120 μ m を越える変位は見られない。 (つまりアライメントこの幅が MuTr-South におけるアライメントの決定精度 という事ではないだろうか?) ・ 120 μ m 以下のアライメント精度を求める場合は、現時点で OASys と zero field run の tracking
 ・ 120 μ m 以下のアライメント精度を求める場合は、現時点で OASys と zero field run の tracking")
10
North Arm

11
North Arm : the movement of Zero field mean & OASys こりゃ非道!!! Zero field 合ってる?? これが本当だと大変な事 だ もっかい解析して

12
North Arm : the movement of Zero field mean & OASys

13
March May st1 march : oct 2-2 dead st1 march : recovered st3 march : oct 5-1 dead

14
統計量の変動 the efficiency par half octant is different in the term ??

15
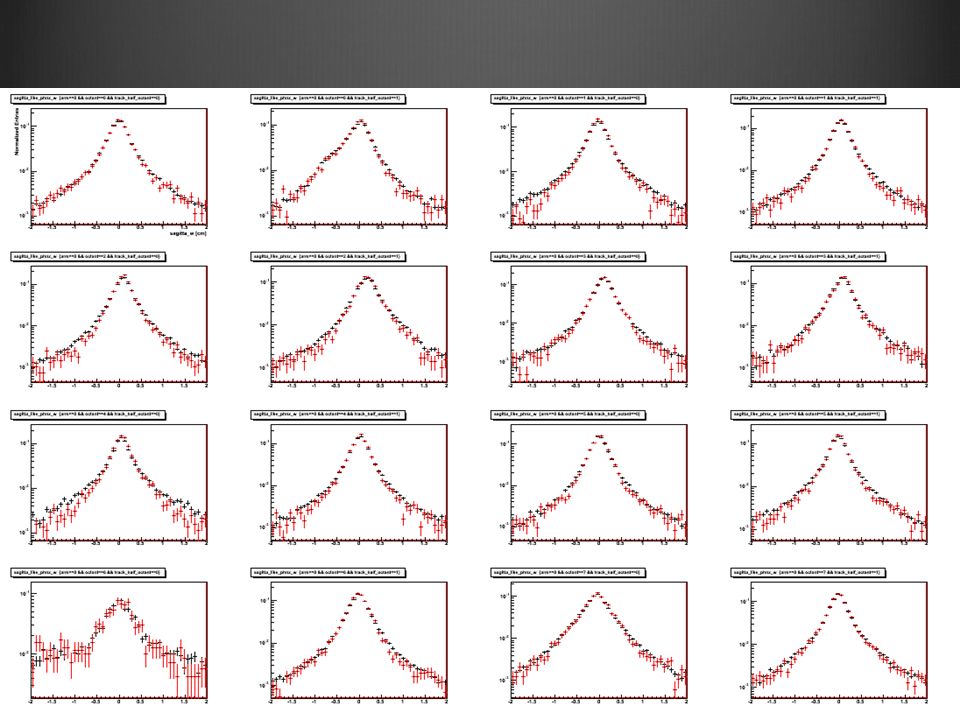
15 Normalized Sagitta distribution March Zerof & May Zerof Black: March data, Red May data North arm sagitta distribution is normalized -2cm to 2cm

16
16 拡大して見て更にわかる様に中心値はズレています。 fittig によるズレでわなく。生データの段階でズレてま す。よって、この mean のズレは BG の揺らぎから来ているのか? tarck のイベントセレクションを行う事で、 変化するのであろうか??んー疑わしいが、イベントセレクションしてみます。 800 μ m とかズレちゃう連中。 0

17
17 ちなみに south を見るとこんなにもキレイ!!

19
pedestal RMS study

20
Run9 に於ける Zero field run のデータ取得時期は以下の通りである、その run に使 用されていた pedestal data を見る事で、その run の信用性というか、なんだろ う、、、とにかく、そこに注目してみる。 Run9 March Zero field ※ 統計的に 3/10 に取得したデータがメインである。 North-06Mar09_2137 North-03Mar09_1853 サイト内の情報が正しければこの時期の calibration data は数日に一回しか取られ ていなかった。よって、 Zero field March は North-06Mar09_2137 に取得された calibration data を用いて構成されている。 South-09Mar09_2234 South-10Mar09_2216 South-06Mar09_2150 South-02Mar09_1922 calibration に使用したデータ Zero field March データ取得期間と calibration data

21
North-06Mar09_2137 前回、取得した際の pedestal のパスルハイトとの差分である dpede が st2 octant 2 で 194 とい う異常な値を示した意外は正常で安定な calibration data であると言えると思う。

22
Run9 May Zero field ※ Zero field march と違い複数回に分けてデータ取得が行われた。 Zero field May データ取得期間と calibration data North-15May09_1020 North-17May09_0823 North-19May09_064 North-18May09_1819 North-22May09_1443 North-24May09_0209 North-26May09_0046 North-29May09_172 North-30May09_1643 とりあえず、 North Arm だけでこんなにもの calibration data を取得していた。

23
Sample plot あれだけの数のキャリブレショーンデータを一つ一つ見て行くのは違うと思うのでマ クロを組み月単位に各 station 毎の octant の pedestal RMS を見て行く。ちなみに青い縦 線が Zero field run に用いられた calibration data である。全結果は次のスライド以降に まとめる。 1 month

24
March pede RMS North station1 March pede RMS North station2 March pede RMS North station3 May pede RMS North station1 May pede RMS North station2 May pede RMS North station3

25
March pede RMS North station1 March pede RMS North station2 March pede RMS North station3 May pede RMS North station1 May pede RMS North station2 May pede RMS North station3

26
上記にある2つのスライドは zero field run を取得した3月、5月に対して全ての pedestal RMS をそれぞれ比べたものである。 これは、まず Zero field run が行われた時点だけという局所な視点で pedestal data を 見るのではなく、全体として各 octant でのノイズレベルを知るために1ヶ月全体で 評価する plot を作成した。そして、 Sagitta analysis の不自然な巨大変位から North Arm の方が South Arm よりノイズレベル、すなわち pedestal RMS が高くなると考え ていた。 結果として pedestal RMS はどの octant に於いても基本的には RMS 2 近傍に分布し ている。しかし時々 RMS 5 を越えるような非常に不安定な pedestal が存在してい た。特に South Arm の方が North arm に比べて不安定な pedestal が多い事がわかった。 しかし、結局のところ今回の様な2つの Zero field run を用いて MuTr の変位を評 価する解析に於いて重要なのは、やはり Zero field run が行われた時点の pedestal 情 報である。 Zero field を取得した際の pedestal 情報を見て、そこに異常性が発生しているかを確 認したところ、いくつかの run に RMS 5 を越えるような pedestal を使用している事が わかった。 特に North Arm に注目して、以降のスライドに各 station 毎で評価した結果を載せる。

27
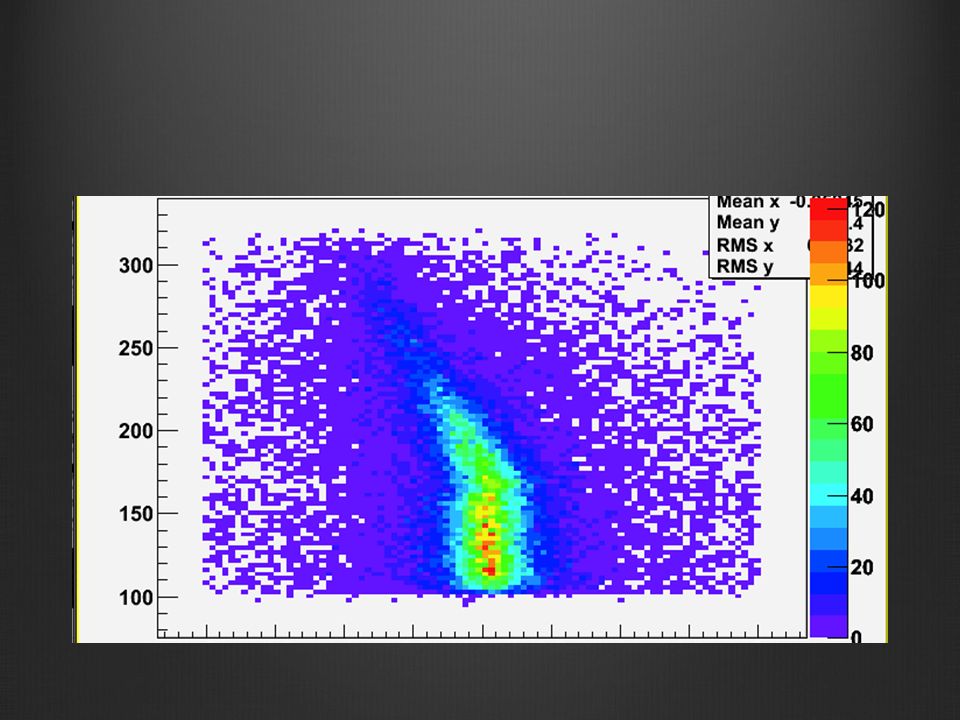
Zero field March はこの calibration data をほぼ全ての統計に対し使用していた。 North octant 7 に於けるこの RMS 14 という値は明らかに異常である。 これがどの程度、そしてどの様な影響 を residual 分布に及ぼすかは未知数。 North station1 : Zero field March North-06Mar09_2137 pedestal rms に関してとりわけ、おかしいのがこいつで す。

28
North station1 : Zero field May zero field calib:21,24,26,27,32,33,36,43,4 5 May の中でもっとも RMS の変動の激しかった satation1 に関して RMS 4を越えるだけ

29
octant 7 mask zero field の巨大変位に関して、 octant 7 については、この pedstal RMS の異常で説明づけ られるかもしれないが、他の octant に関してはこれが言えな い。 という事は、この RMS は原因の一つではあるが、 主要な効果ではないだろう。 とにもかくにも、この zero field における巨大変 位をどうにかして解明し たい。

30
pedestal study Run9 May のデータ デットマップの再評価をしたい。

Similar presentations
 母集団の分散(母分散) 母集団中のある値の比率(母比率) p Sample 標本平均 標本分散(不偏分散) 標本中の比率.>")



>")

 3 相関係数.>")
 の アライメント 浅野秀光 ( 京大理) for the PHENIX collaboration 1 日本物理学会 2011 秋.>")
 2012/10/20 E07>")


アイエスシイ 犬飼隆義.>")







