Download presentation
Presentation is loading. Please wait.

1
自動追尾型移動体の作成 指導教官 : 青山 義弘 研究者 : 岡出 幸久 山本 雅俊 吉 田 創

2
研究の背景 現在、ロボットの研究は非常に盛んに行わ れている 授業や実験で得たことを利用してロボット 制御の研究は出来ないか ↓ 機械的な要素ではなく、センサ部・制御 部にスポットをあてたロボット制御の研究

3
研究の目標 自律型ロボット・・・ – 操縦者を持たない – 外部からの情報をマイコンや電子回路で解析 して制御をする 製作する移動体 – 障害物を発見したら回避する – 目標を発見すると、一定距離で追跡する

4
具体的には・・・ 先頭を進む移動体・・・ 親機 ( 1台 ) 後について行く移動体・・・ 子機 ( 数台 ) ↓ 親機の後ろを子機達が一列に並んでついてい く ⇒ カルガモ親子の行列 移動体の 平均速度 → 毎秒1 0㎝ 一定間隔 → 5~1 0㎝
 後について行く移動体・・・ 子機 ( 数台 ) ↓ 親機の後ろを子機達が一列に並んでついてい く ⇒ カルガモ親子の行列 移動体の 平均速度 → 毎秒1 0㎝ 一定間隔 → 5~1 0㎝")
5
移動体の動き 親は位置を知らせる子は親をさがす 子が親を見つける 子は親の後ろに列を作って進む

6
親機の行動 四方に光を出して、どの方向からも子機が 反応できるようにする ↓ 子機からの反応があった場合には、後ろに のみ光が行くように切り替える

7
子機の行動 親機からの光に向かって走り出す ↓ 距離を測って走りつつ、仮親となり、残り の子機に対しての親機の役割を果たす ( 親 機の行動をとる ) 障害物を発見したら、回避する
 障害物を発見したら、回避する")
8
機体作製中 試作品の作製 ・・・子機を1台作製 中 障害物を避けて動く 親の光を見つける ↓ 親からの光をもとに親を 追尾する 試作品のセンサ配置図

9
センサ部制御部開発

10
距離センサの開発 移動体に必要な能力として・・・ ① ①親と子供を識別する ② ②親との距離を判断する ③ ③周りの障害物を確認する ⇒ 障害物センサ 障害物センサは市販されている光センサを使用 ⇒ 距離センサ

11
距離センサのしくみ 親は光を発して、光センサを付けた子に 存在を知らせる 光の有無 → 前方の親の有無を確認 光の強さ → 親との距離を測定

12
LED・光センサの選択 蛍光灯の発光スペクトルを考慮して最適な ものを選びだす 結果:蛍光灯の光には 赤色 (λ : 680 ~ 780nm) の成分が 弱い 蛍光灯の発光スペクトル図 赤色発光のLED 赤色に敏感な光センサ を使用する
 の成分が 弱い 蛍光灯の発光スペクトル図 赤色発光のLED 赤色に敏感な光センサ を使用する")
13
増幅器設計 光センサだけでは電圧の変化量が少ないため、 ある距離間でのA / D変換結果も変化が少な い 増幅器を光センサ、A / D変換器間に配置する ↓ 変化量を大きく与える

14
LPF設計 光センサにはLEDからの光以外に蛍光 灯などの光が残っている ↓ LEDの光のみを取り出し、蛍光灯の 影響を抑えるため、低域フィルタ(L PF)を構成する必要がある
を構成する必要がある")
15
距離センサのブロック図 光センサ・LPF・増幅器を配置して CPUに照度の値を送る距離センサと なる

16
制御部とセンサ部とのやり取 り センサ部 前方の距離 障害物の有無 制御部 距離に応じた速度設定 障害物をよけるように 進行方向設定 モータ モータに適応!!

17
マイコンについて① 制御するのに、電子回路の組み合わせだけ でできるのか ↓ 1チップマイコンを使用することにする 様々なマイコンからポピュラーなものを数 種類選び出し、その中から今回使用するマ イコンを検討した

18
マイコンについて② 日立製作所の組み込みマイコン “ H8 3048/F ” を 使用 子機のマイコン 複雑な処理 メモリ容量、割り込み、I/Oなどの点 で優れている

19
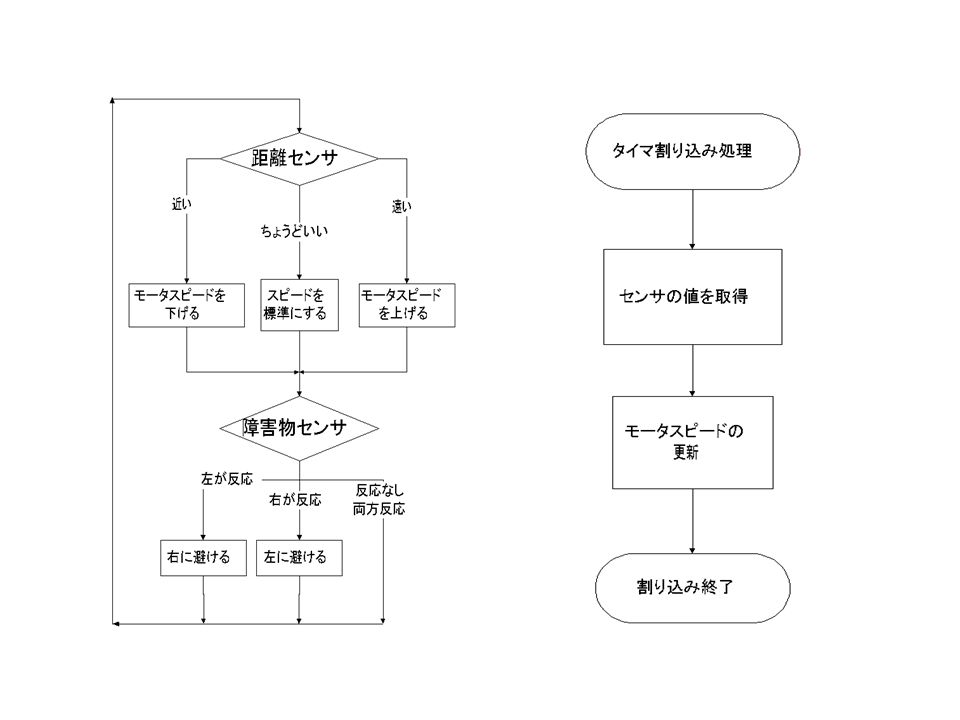
マイコンの機能① ITU (Integrated Timer Unit) 5チャネルの16ビットタイマで構成される 8種類のカウンタ入力クロックを選択可能 タイマ割り込みに使っているタイマユ ニット 距離センサ・障害物センサの値をとるの にタイマ割り込みを使用
 5チャネルの16ビットタイマで構成される 8種類のカウンタ入力クロックを選択可能 タイマ割り込みに使っているタイマユ ニット 距離センサ・障害物センサの値をとるの にタイマ割り込みを使用")
20
マイコンの機能② A/D変換器 – 10ビットの分解能 – 1チャネルあたり最小7.4 μ s I/Oポート – 障害物センサや、距離センサなどを接続 DMA(Dynamic Memor y Access) – 16Mバイトのアドレス空間を直接指定可能
 – 16Mバイトのアドレス空間を直接指定可能")
21
マイコンでの制御について マイコン側で行う制御は以下の通り センサのチャネル切り替え センサの値を読み取る センサからの値で行動を決定 前進、後退、方向転換などの行動がある モータの制御

22
今後の課題 プロトタイプの製作、動作テストに入る テストにおいて発覚した問題点の原因を 吟味、改善していく 以上を繰り返していき、目標とする台 数を生産する。

23
プロトタイプ(子機:センサ部取 付未)
")
Similar presentations








と状態で何をするか決める>")

 ~.>")







 コンピュータ(ハードウェアを中心に)>")
