Download presentation
1
東京工業大学 機械制御システム専攻 山北 昌毅
システムモデルと確率過程 東京工業大学 機械制御システム専攻 山北 昌毅

2
よく用いられるシステムのモデル (計算機で信号をサンプルする際)
AR(Auto Regressive)モデル MA(Moving Average)モデル ARX(exogenous)モデル ARMAモデル ARMAXモデル 工学系で対象にされるシステムは連続系のシステム。本当にこれで表現できるの?
モデル. MA(Moving Average)モデル. ARX(exogenous)モデル. ARMAモデル. ARMAXモデル. 工学系で対象にされるシステムは連続系のシステム。本当にこれで表現できるの?")
3
第1回講義の内容 状態空間表現とLTIシステム LTIシステムと伝達関数・可観測正準系 LTIシステムの解とシステムの離散化
可観測正準系と入出力モデル Z変換・パルス伝達関数・シフトオペレータ・微分オペレータ 式誤差モデル・出力誤差モデル 伝達関数とマルコフパラメータ 確率過程 エルゴード性 確率変数の収束 推定量の性質

4
状態空間表現とLTIシステム システム 状態方程式 観測方程式 LTI(Linear Time Invariant) システム
状態方程式 (ベクトル値関数の一階の常微分方程式) 観測方程式 LTI(Linear Time Invariant) システム
 観測方程式. LTI(Linear Time Invariant) システム.")
5
LTIシステムのブロック線図表現

6
状態空間表現(1) 1.厳密な数学モデル 2.近似数学モデル
 1.厳密な数学モデル 2.近似数学モデル")
7
状態空間表現(2) 1.厳密な数学モデル
 1.厳密な数学モデル")
8
状態空間表現(3) 2.近似数学モデル
 2.近似数学モデル")
9
ラプラス変換の性質

10
良く使うラプラス変換と逆変換

11
ラプラス変換の利用法 時間領域での表現 時間領域での表現 畳み込み積分 ラプラス変換 逆ラプラス変換 周波数領域での表現 周波数領域での表現
掛け算

12
状態空間表現と伝達関数行列

13
可観測正準系(1)
")
14
可観測正準系(2)
")
15
連続系の時間領域の入出力表現 (注意:微分方程式表現で入力の微分項があっても実現には微分器は不要)
")
16
状態方程式の一般解 物理システムは連続系のシステムとして表現されることが普通 (一般解) (遷移行列)
 (遷移行列)")
17
一般解の証明 公式

18
入出力関係の畳み込み積分表現

19
マルコフパラメータと伝達関数の関係

20
システムの離散化(1) プラント D/A A/D ZOH 計算機 計算機でy(k)を観測してu(k)を決定することになる
 プラント D/A A/D ZOH 計算機 計算機でy(k)を観測してu(k)を決定することになる")
21
システムの離散化(2)
")
22
システムの離散化(3) +
 +")
23
離散時間系の時間領域の入出力モデル

24
AR(Auto Regressive)モデル
MA(Moving Average)モデル ARX(exogenous)モデル ARMAモデル ARMAXモデル
モデル. ARX(exogenous)モデル. ARMAモデル. ARMAXモデル.")
25
Z変換・パルス伝達関数、シフト・微分オペレータ

26
式誤差モデル・出力誤差モデル(BJモデル)(1)
式誤差モデル:ダイナミックスの前に外乱が入る構造 (式の誤差として外乱が入る構造) 出力誤差モデル:ダイナミックスの後に外乱が入る構造 (出力に誤差が入る構造) BJ(Box Jenkins)モデル 式誤差モデルはBJモデルの特殊な場合!
 出力誤差モデル:ダイナミックスの後に外乱が入る構造. (出力に誤差が入る構造) BJ(Box Jenkins)モデル. 式誤差モデルはBJモデルの特殊な場合!")
27
パラメータ同定用モデル ARXモデル NARXモデル NARMAXモデル

28
パルス伝達関数とマルコフパラメータ(1)
")
29
パルス伝達関数とマルコフパラメータ(2)
")
30
パルス伝達関数とマルコフパラメータ(3)
")
31
確率過程(1) 水の上の花粉の軌跡は最初の位置が同じでも、‘熱的ノイズ’によってその軌跡は
非常に異なるものとなる。このような現象を数学的に取り扱いたい。

32
確率過程(2)
")
33
確率過程(3)
")
34
確率過程(4)
")
35
確率過程(5)
")
36
確率過程(6)
")
37
確率過程(7)
")
38
確率過程(8)
")
39
確率過程(8)
")
40
自己共分散とスペクトル密度関数

41
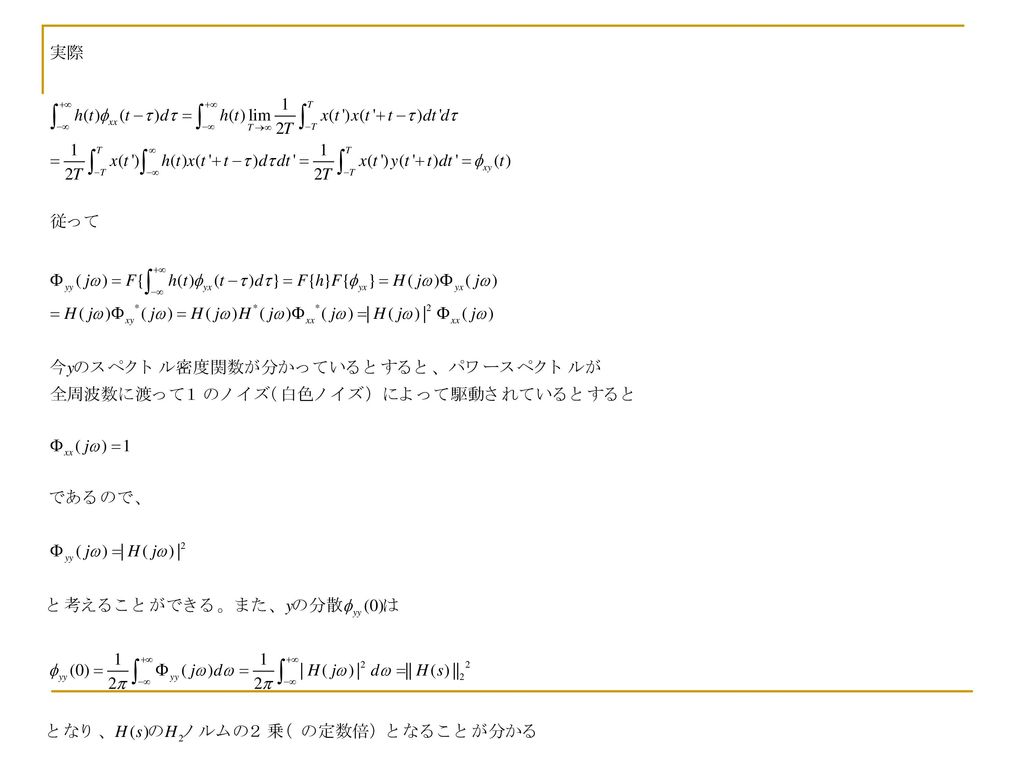
パワースペクトルからの伝達関数の推定

43
伊藤の確率微分方程式‘超入門’

44
伊藤の公式(1) 伊藤の公式(1)
 伊藤の公式(1)")
45
伊藤の公式(2)
")
46
確率変数の収束(1)
")
47
確率変数の収束(2)
")
48
確率収束しても概収束しない例

49
推定量の性質

50
参考文献 山北:システム制御特論テキスト B.エクセンダール(谷口節男訳):確率微分方程式(シュプリンガー・ジャパン)(1999) 相良ら:システム同定(コロナ社)(1995) 足立修一:ユーザのためのシステム同定理論(コロナ社)(1993)
(1995) 足立修一:ユーザのためのシステム同定理論(コロナ社)(1993)")









 ~第5章 ラプラス変換と総仕上げ~>")







 教科書には相当する章はない>")


