Download presentation
1
重力波検出器KAGRAの主干渉計開発 東大理 麻生洋一 他

3
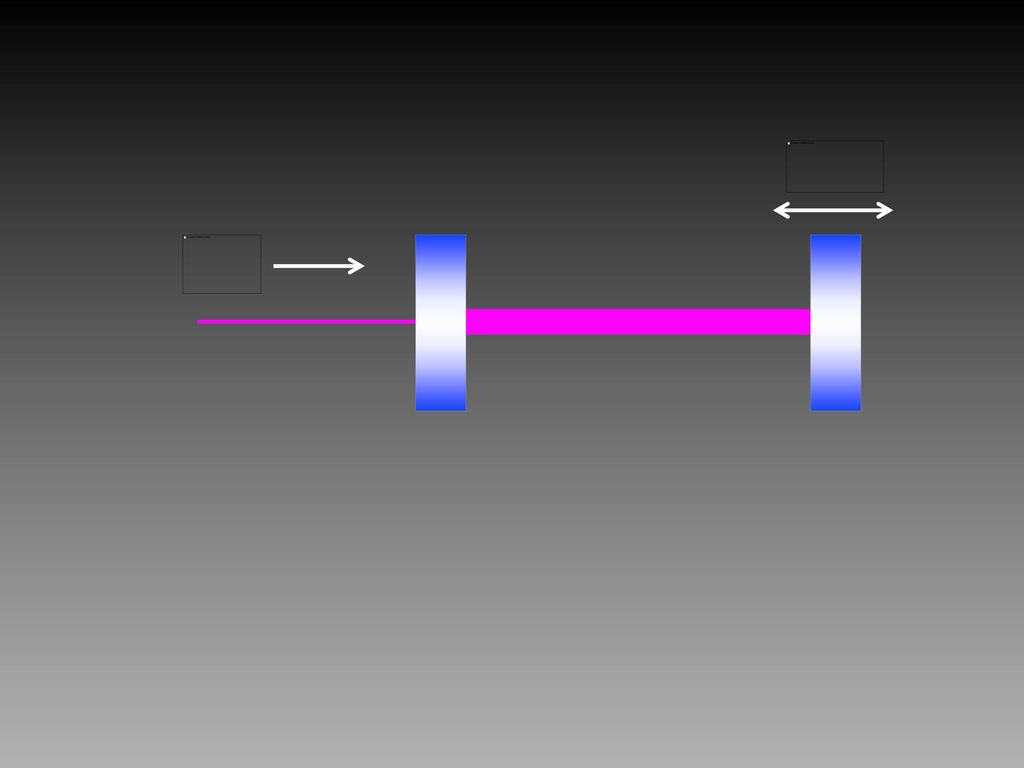
入射ビームは揺れている!!

4
ビームは問題になるほど揺れていない

5
ビームは問題になるほど揺れていない 揺れていないと思う

6
ビームは問題になるほど揺れていない 揺れていないと思う 揺れてないんじゃないかな?

7
ビームは問題になるほど揺れていない 揺れていないと思う 揺れてないんじゃないかな? ま、ちょっと覚悟はしておけ さだまさし 「関白宣言」より

8
ETMY ITMY PRM PR2 ITMX ETMX BS PR3 SR2 SR3 SRM

9
計算方法 Guido Mueller, Optics Express, 18, 7118 (2005)
")
12
= + TEM00 TEM01

17
?
18
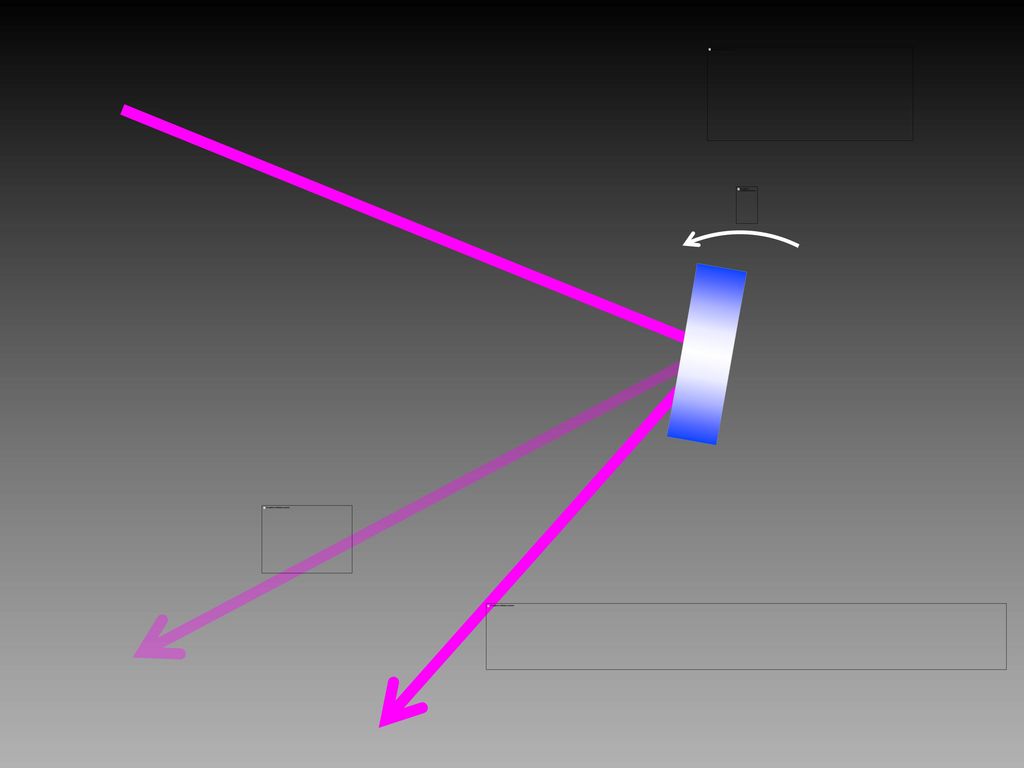
散乱行列

19
傾き θ のミラー

20
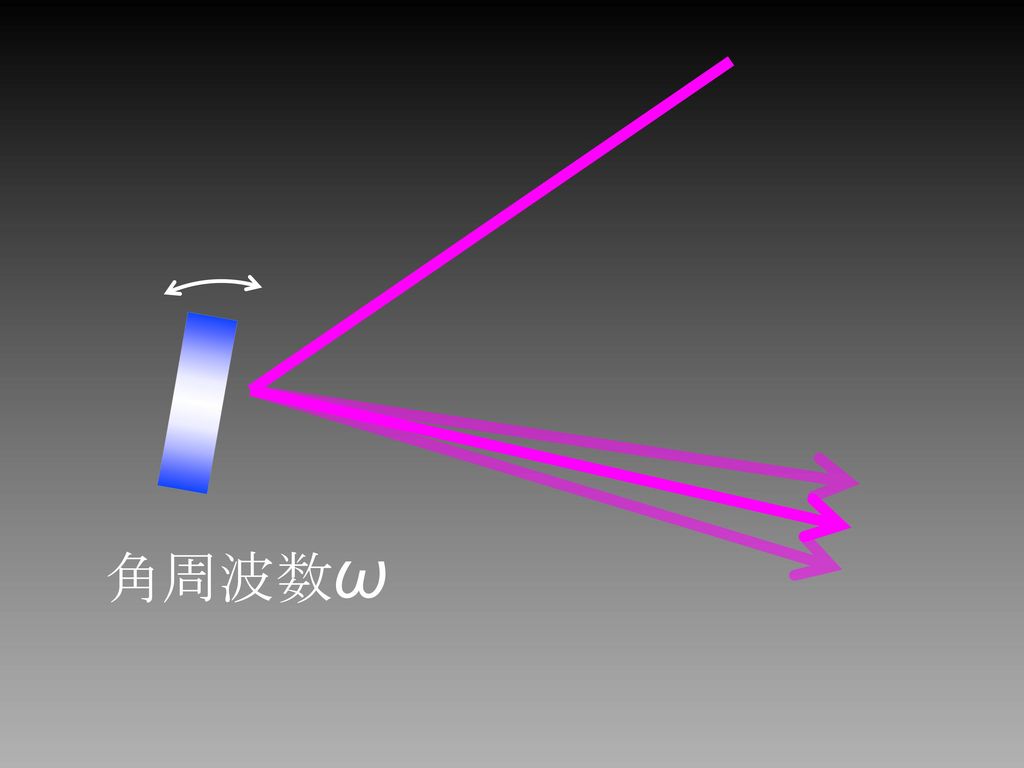
角周波数ω

21
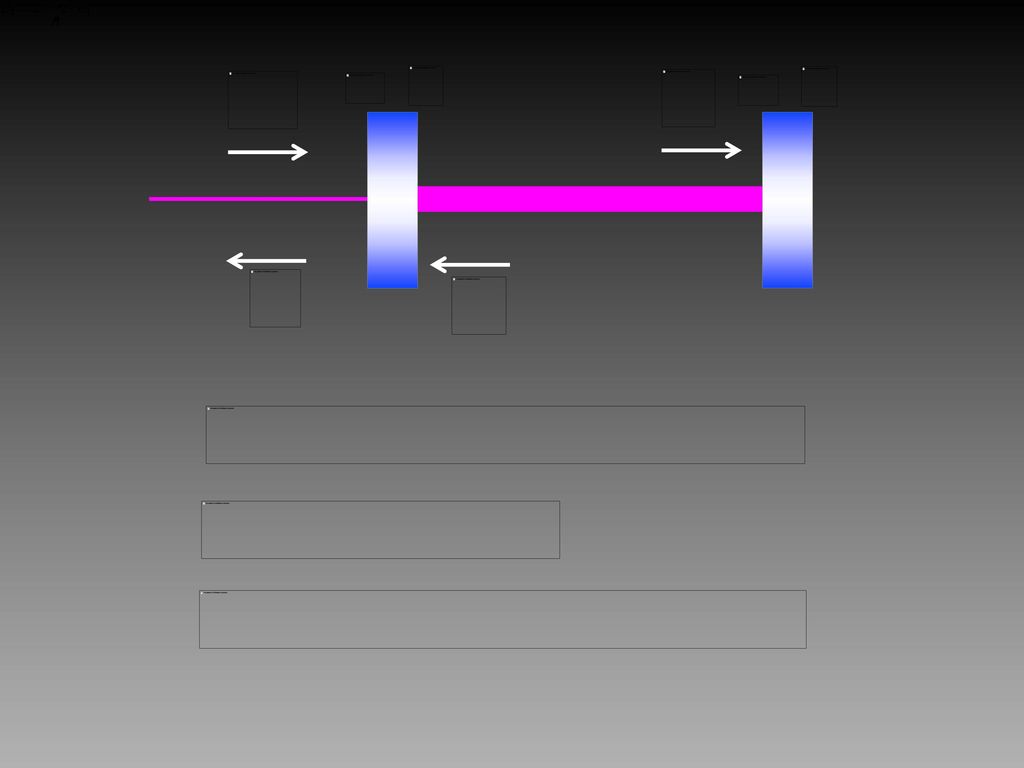
±ωのサイドバンド生成

24
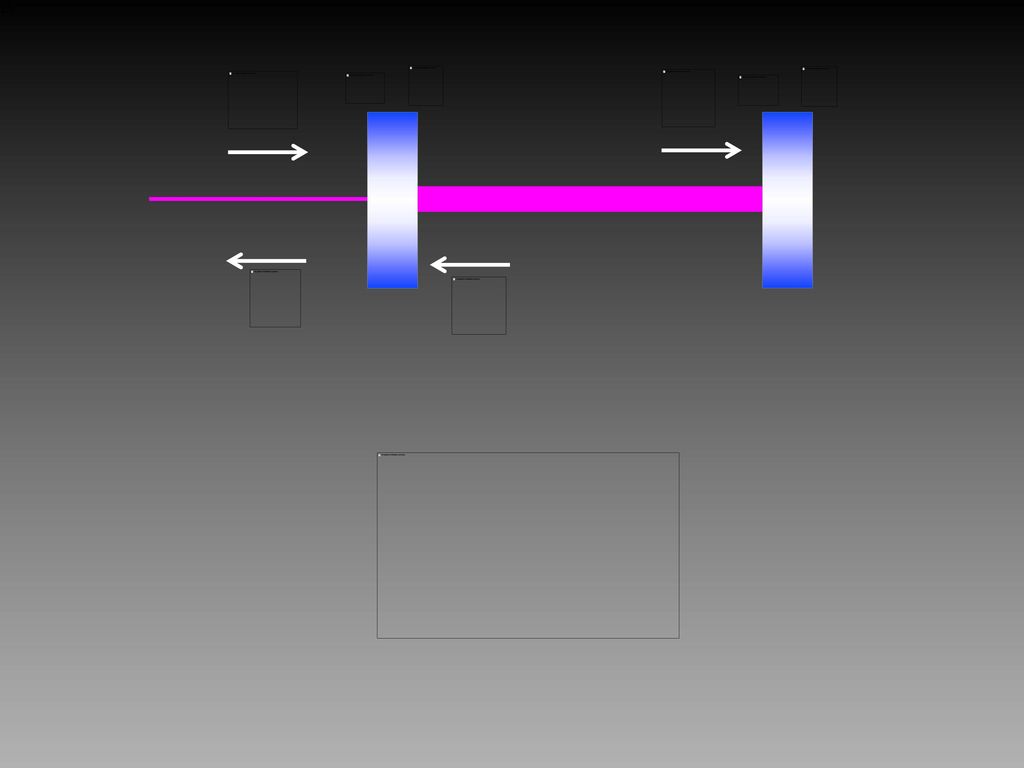
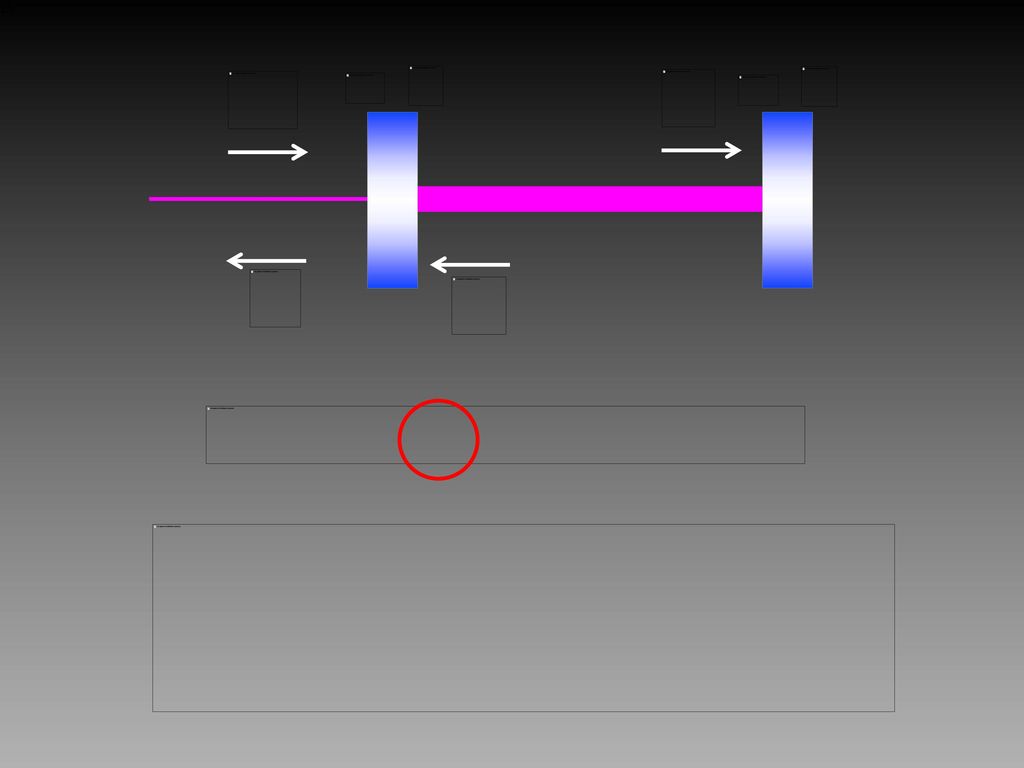
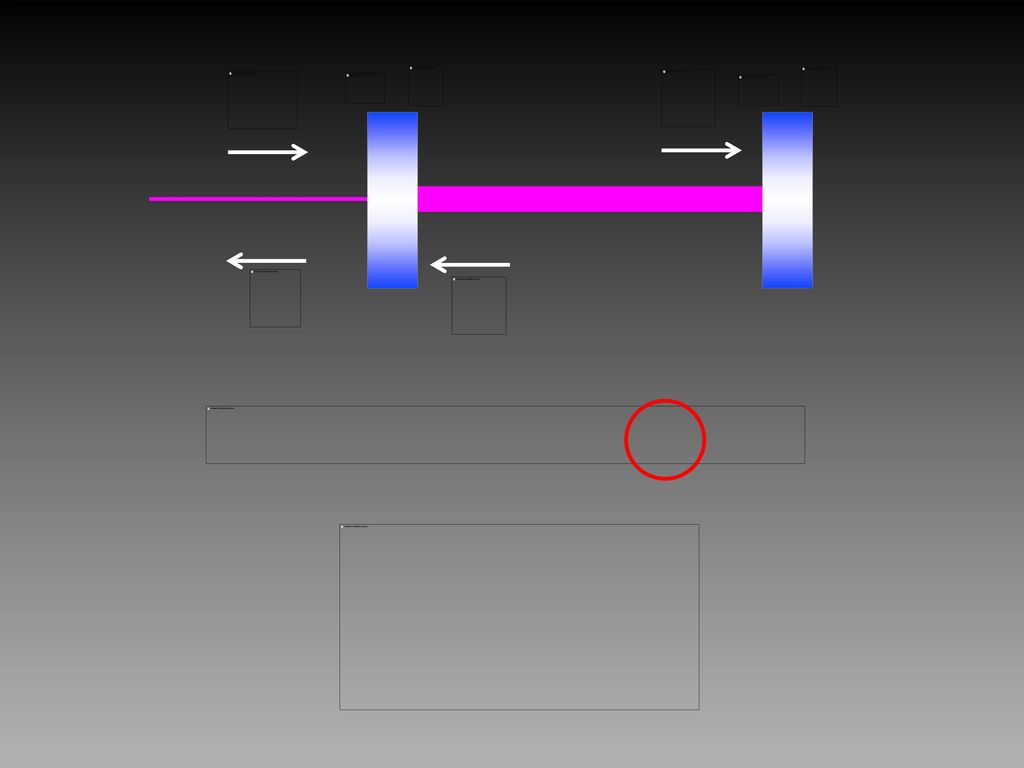
ビームジッタ サイドバンド

27
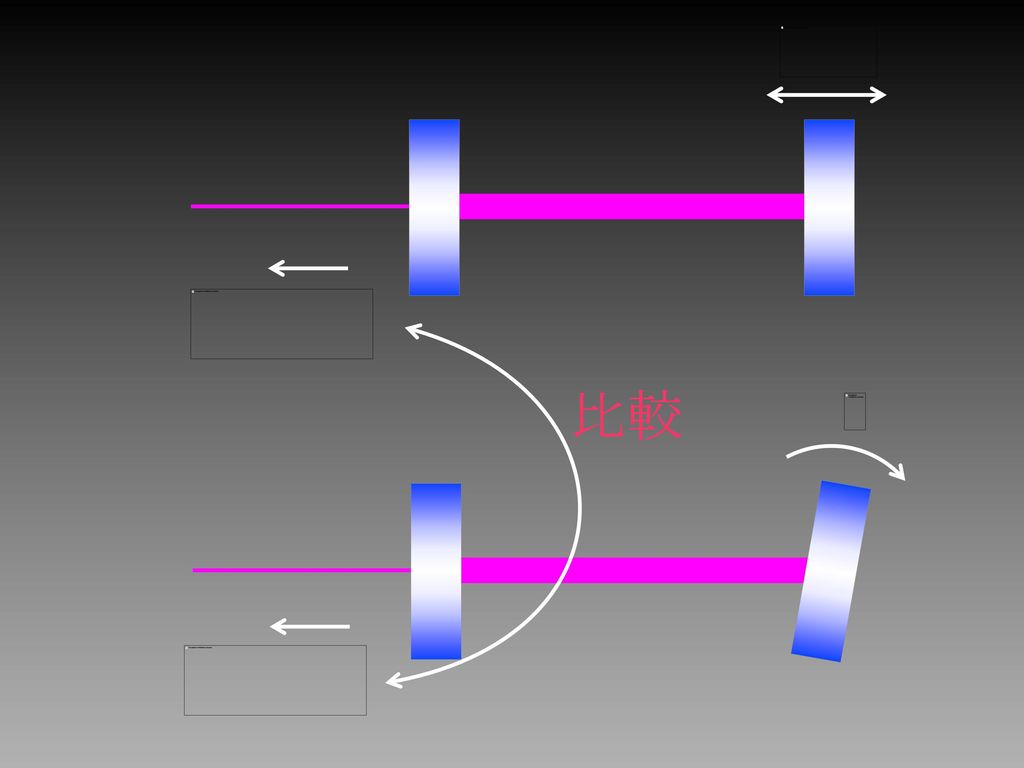
比較

34
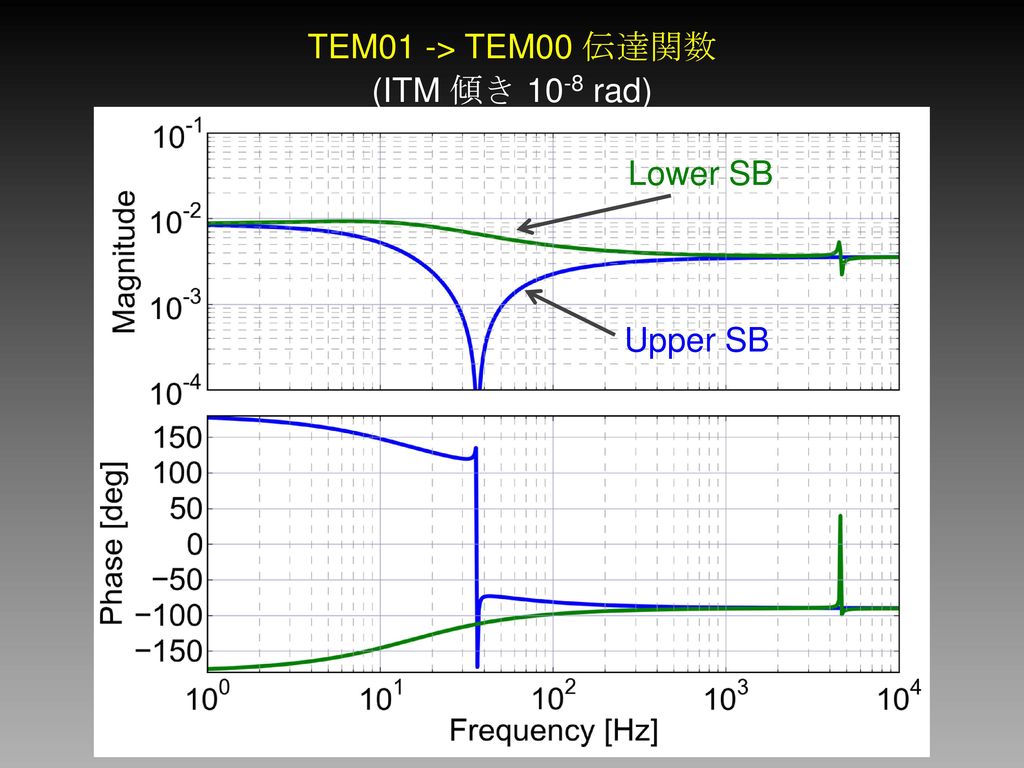
TEM01 -> TEM00 伝達関数 (ITM 傾き 10-8 rad) Lower SB Upper SB
 Lower SB Upper SB")
35
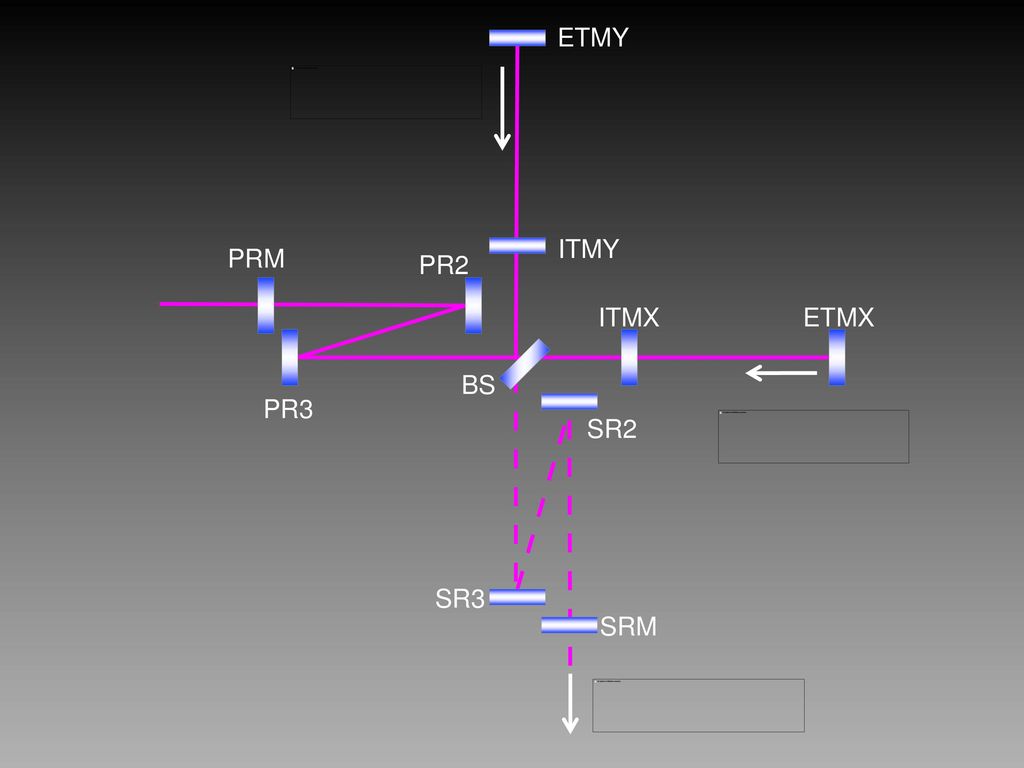
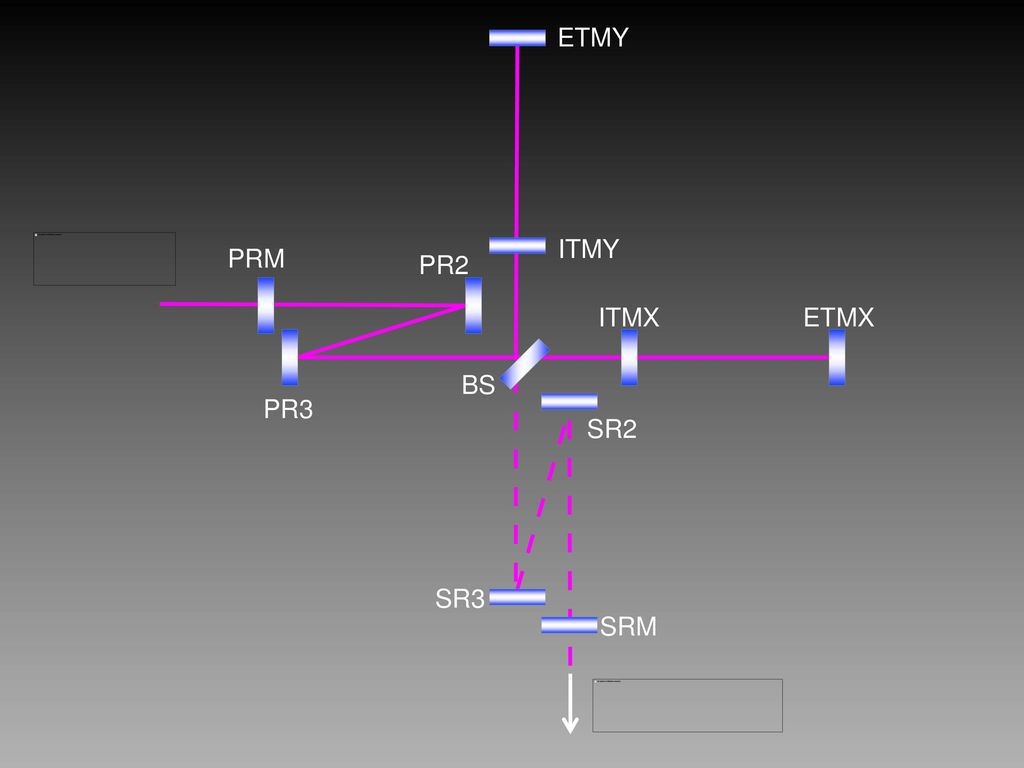
ETMY ITMY PRM PR2 ITMX ETMX BS PR3 SR2 SR3 SRM

36
ETMY ITMY PRM PR2 ITMX ETMX BS PR3 SR2 SR3 SRM

37
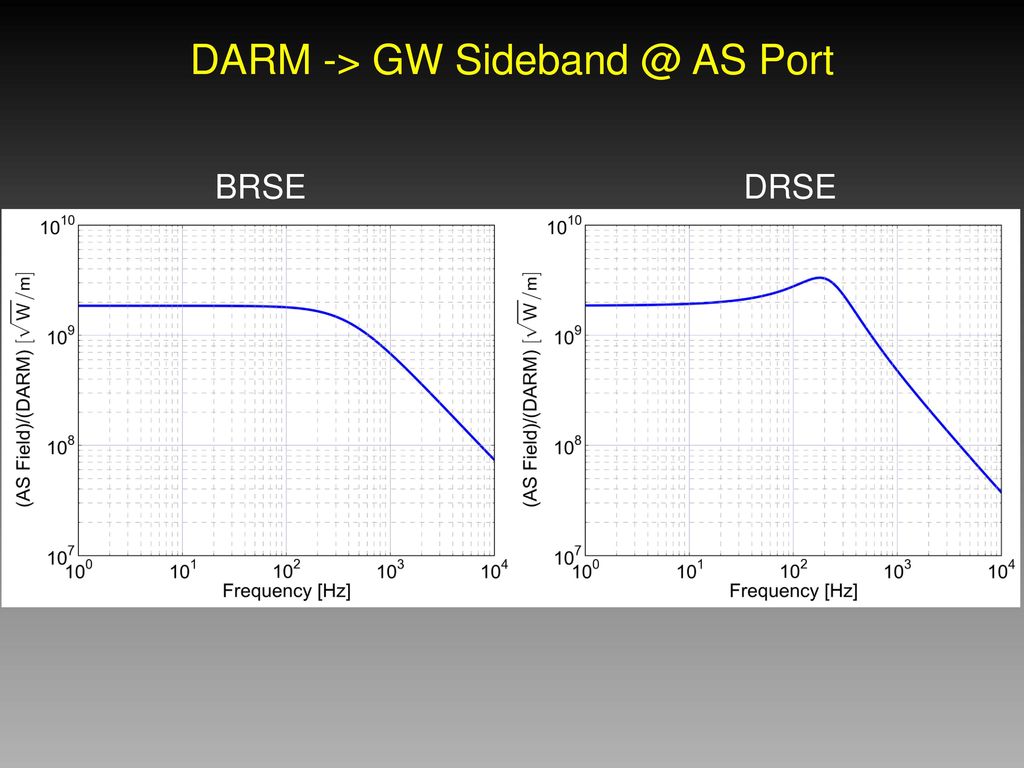
DARM -> GW Sideband @ AS Port
BRSE DRSE

38
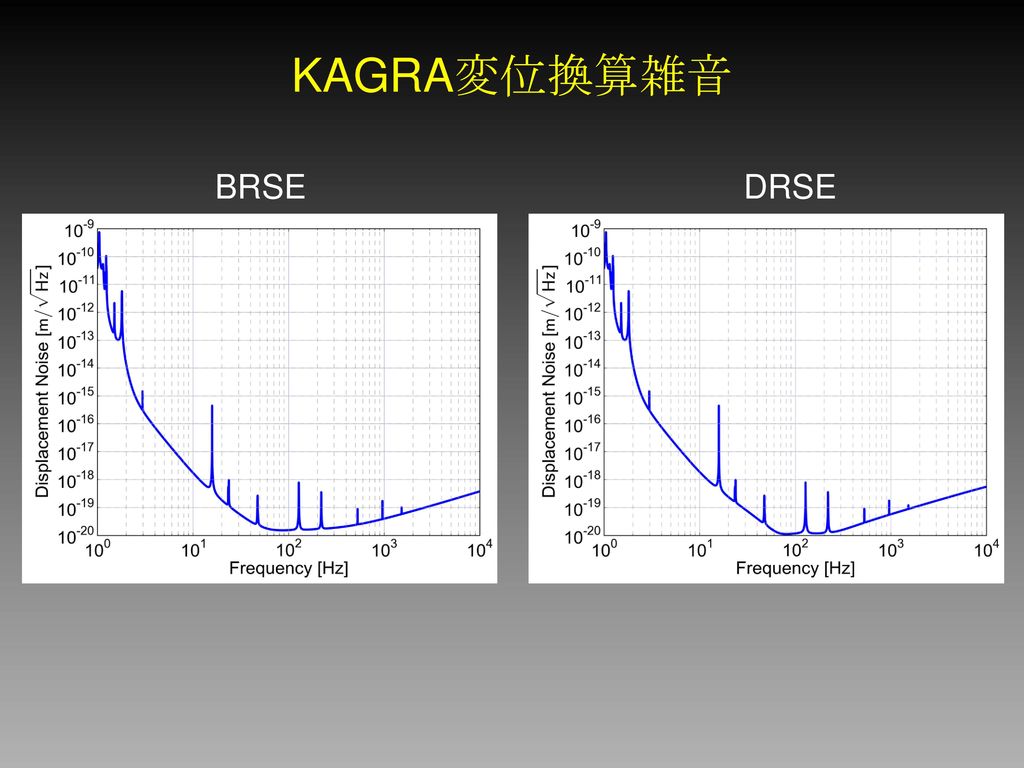
KAGRA変位換算雑音 BRSE DRSE

39
GW Sideband Amplitude @ AS Port

40
TEM01 @ Input -> TEM00 @ AS Port
(BRSE, ITM差動傾き10-8 rad)
")
41
TEM01 @ Input -> TEM00 @ AS Port
(DRSE, ETM差動傾き10-8 rad)
")
42
ETMY ITMY PRM PR2 ITMX ETMX BS PR3 SR2 SR3 SRM 211=2048通り

43
TEM01 -> TEM00 伝達関数 最大値 BRSE DRSE 各鏡の傾きは10-8rad

44
GW Sideband Amplitude @ AS Port

45
入射TEM01振幅への要求値(入射パワー1W)
Safety Factor = 20

46
PRM Mode Matching Telescope Mode Cleaner ビーム径4mm

47
入射光学系回転雑音要求値 Safety Factor = 20

48
TAMA Suspension

49
TAMA Suspension 並進->Pitch 伝達関数
新井宏二 修論

50
TAMA Suspension 並進->Pitch 伝達関数

51
推定回転雑音 vs 要求値 DRSE要求値 TAMA Suspension 回転雑音 BRSE要求値

52
干渉計ミラーの傾きRMS < 10-8 rad

53
RF SBはまだ考慮していない OMC REFL POP ASPO OMCREFL AS_DC ETMY PRM ITMY PR2 ITMX
ETMX POP BS PR3 SR2 SR3 SRM ASPO OMCREFL OMC AS_DC

54
輻射圧効果

55
結論 主干渉計サスペンションの回転防振が重要 RMS < 10-8 rad


 WG 第3回ミーティング (2005 年 5 月 12 日 国立天文台, 東京 ) 1 光共振型 DECIGO の可能性 安東 正樹 東京大学 理学系研究科 物理学教室.>")


>")





>")









 防振の基礎 KAGRAで求められる防振性能>")