筋骨格力学モデルとモーションキャプチャを用いた 人間の関節の受動的スティフネスの推定とその医療 応用 Passive Stiffness Estimation of Human Joints and its Medical Applications Based on Musculoskeletal Dynamics Model and Motion Capturing ベンチャ ジェンチャン, 山根克, 中村仁彦 Gentiane Venture, Katsu Yamane & Yoshihiko Nakamura 東京大学 ー 知能機械情報学 The University of Tokyo – Department of Mechano-Informatics 日本学術振興会外国人特別研究な扶養 Those research works are supported by the Japanese Society for Promotion of Science 日本 IFToMM 会議 2006 年
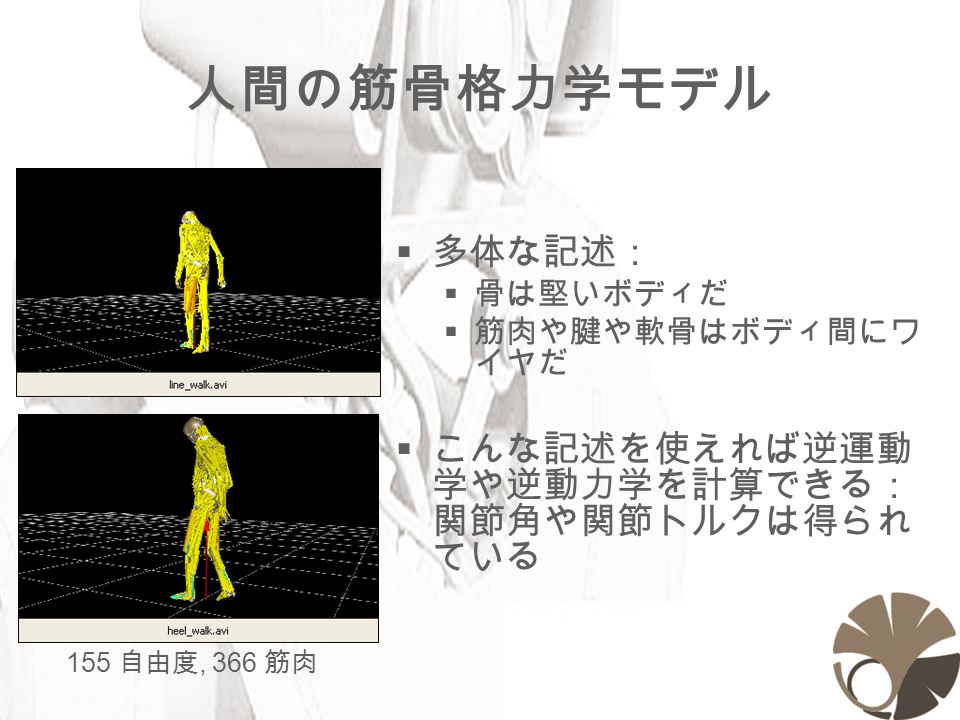
人間の筋骨格力学モデル 多体な記述: 骨は堅いボディだ 筋肉や腱や軟骨はボディ間にワ イヤだ こんな記述を使えれば逆運動 学や逆動力学を計算できる: 関節角や関節トルクは得られ ている 155 自由度, 366 筋肉
背景 神経筋や筋肉の疾患の医学的な診断や発展のトラッ キング 今まで診断は見ることしかできない リハビリテーション : 病後、動きを取り戻すことの 数量化 パーキンソンの場合 数量化は医師のために大切なことだ
背景 関節の凝りの評価をトルクメーターで : 大きくて高い機械, キャリブレーションが多い, 病気や年長の人たちの 診断には不便 だ 簡単で痛みがない システムが必要だ
概要 人間の動きの測定 ■ 実験のシステム 関節の力学モデルー受動的な動きの場合 同定方法 実験の結果 結論
人間の動きの測定 モーションキャプチャシステム 再帰性反射材マーカとモーションキャプチャカメ ラ ( 高速 / 高分解能: 30 fps)
実験 : パーキンソン診断 医師が執行 従来の診断方法と同じ 容易 痛みがない 同時に診断もできる
非侵襲筋電位計 (EMGs) サンプリングレート: 1 KHz 筋肉の知識 EMGs は受動的な動きであることを確認するために最初の実験だ け計測すればよい
動きから動力学まで 逆運動学 : 関節角 逆動力学 : 関節トルク 関節角 関節トルク
関節の力学モデル q は関節角のベクトル, q j は j 番関節角だ D P はシステムの慣性パラメータのベクトル Γ は関節トルクのベクトル Q は外力のベクトル H は慣性やコリオリや引力のベクトル Γ e, Γ v, Γ f は関節の弾力, 粘性, 摩擦の力
関節の力学モデルー受動的な動きの場 合 外力なし: Q = 0 と 受動的な動き: Γ = 0 動作中標本抽出する H は人間の筋骨格力学モデルで計算されている
同定方法 多変数システム 過拘束なシステム ( 動作中標本抽出したことによ る ) 最小二乗法 能率的, 早い 状態数の計算できる: Cond(W) 標準偏差の計算もできる: X j% 標準偏差利用 : X j% <10 評価は OK X j% >10 評価は悪い でも X j <<1 の場合結論できない
実験の結果 Xj %<10 評価は OK Y = W.X +
実験の結果 Y = W.X +
結論 独自で無痛な関節の堅さの in-vivo 推定法 簡単な実験システム : モーションキャプチャのみ : 無痛, 手軽, 衛生的 … 簡単に普及 医師の神経筋や筋肉の疾患の診断中に推定できる 上肢における推定を行う上で診断の動作には改善 の余地がある 制限 : 線形モデル リハビリテーションへの利用 ロボティクスへの利用 : ヒューマノイドロボット, 人工器官
どうもありがとうございました 質問はありませんか? この実験は山本先生にお手伝いいただきました Contact: general: musculo-skeletal computations: