磁歪素子を用いた3軸球面モータの 駆動原理と特性評価 A-42 磁歪素子を用いた3軸球面モータの 駆動原理と特性評価 電気電子システム工学科 知能電気機器研究室 坂本龍介
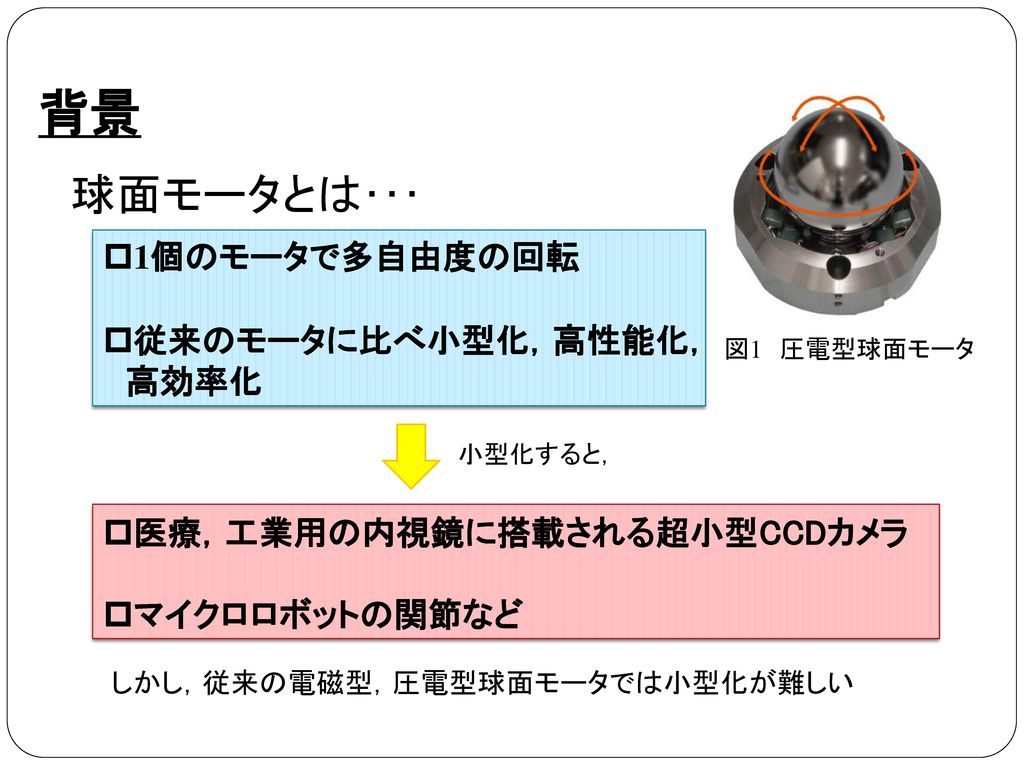
背景 球面モータとは・・・ 1個のモータで多自由度の回転 従来のモータに比べ小型化,高性能化, 高効率化 背景 球面モータとは・・・ 1個のモータで多自由度の回転 従来のモータに比べ小型化,高性能化, 高効率化 図1 圧電型球面モータ 小型化すると, 医療,工業用の内視鏡に搭載される超小型CCDカメラ マイクロロボットの関節など しかし,従来の電磁型,圧電型球面モータでは小型化が難しい
鉄ガリウム合金を用いた3軸球面モータを開発 目的 これまでの研究で2軸球面モータを作製 鉄ガリウム合金を用いた3軸球面モータを開発 鉄ガリウム合金とは・・・ 鉄系の磁歪材料→磁歪200~300ppm 延性材料→機械加工可能 高透磁率→小さい起磁力で動作可能 小型化に有効 本研究では駆動原理の検証およびその特性評価を行った
球面モータの構成 図2 球面モータの構成図 図3 球面モータの断面図
X,Y軸回転のためのロッドの変形 x y z 図4 ロッドの変位(X,Y軸回転) 微小回転 磁石の起磁力による磁束 伸び 縮み 磁束減少 磁束増加 図4 ロッドの変位(X,Y軸回転)
Z軸回転のためのロッドの変形 x y z 微小回転 磁石の起磁力による磁束 曲げ 磁束増加 磁束減少 図5 ロッドの変位(Z軸回転)
1方向への回転原理 (a) slow (b) rapid Current Time θ Time (a)緩やかな立ち上がり:ロータが微小回転 1方向への回転原理 ノコギリ波電流で励磁(X,Y,Z軸回転に共通) (a) slow (b) rapid Current Time θ Displacement,Angle A2 A1 θ A1 A2 Time (a) slow deformation (b) rapid deformation 図6 ノコギリ波電流を流した時のロッドと変位の関係 (a)緩やかな立ち上がり:ロータが微小回転 (b)急な立下り: ロータの微小回転を保持したまま元へ戻る →繰り返すことで1方向へ回転が可能
作製した球面モータの写真と寸法図 1mm 図7 作製した球面モータ 図8 球面モータの寸法図 ロッドの変位およびロータの回転速度を測定
ロッドの変位(X,Y軸回転) 励磁したロッド →ノコギリ波電流に追従,平均1.2mm変位 図9 X軸回転の変位の時間応答(周波数1kHz) 図10Y軸回転の変位の時間応答(周波数1kHz) 励磁したロッド →ノコギリ波電流に追従,平均1.2mm変位
図11 Z軸回転の変位の時間応答(周波数1kHz) 励磁したロッド →ノコギリ波電流に追従,平均7.3mm変位 X,Y,Z軸回転でロッドがノコギリ波で変位
図12 X,Y軸回転での回転速度と周波数の関係 回転速度:約6kHz(X軸回転),約7kHz(Y軸回転)まで比例で増加
モータの駆動(X,Y軸回転) 図13 X軸回転(周波数6kHz) 図14 Y軸回転(周波数7kHz)
ロータの回転速度(Z軸回転) 図15 Z軸回転での回転速度と周波数の関係 回転速度:約4kHzまで比例で増加
モータの駆動(Z軸回転) 図16 Z軸回転(周波数4kHz) 3軸でロータが回転
まとめ,今後の課題 医療・産業分野での応用を目指す まとめ 3軸球面モータを作製 ロッドの変位を測定 まとめ,今後の課題 まとめ 3軸球面モータを作製 ロッドの変位を測定 →X,Y,Z軸回転においてロッドのノコギリ波の変位を確認 ロータの回転速度を測定 →X軸回転で 約6kHz,Y軸回転で約7kHz, Z軸回転で約4kHzで回転速度が最大 今後の課題 回転を1軸で安定させる締め付けの機構,駆動電流の検討 トルクや駆動電圧などを測定 小型化するための駆動回路の設計および作製 医療・産業分野での応用を目指す
ご静聴ありがとうございました
ロッドの変位の測定方法 (a) X,Y軸回転のロッドの変位の測定 (b) Z軸回転のロッドの変位の測定 (c) ロータの回転速度の測定 ロッドの変位の測定方法 ノコギリ波(±0.2V) (b) (a) (c) 図10 測定装置 (a) X,Y軸回転のロッドの変位の測定 (b) Z軸回転のロッドの変位の測定 (c) ロータの回転速度の測定
ロッドの磁歪特性 図 X軸回転のための励磁をしたときの変位 図 Y軸回転のための励磁をしたときの変位
ロッドの磁歪特性 図 すべてのコイルにZ軸回転のための励磁をしたときの変位
モータの改善点 改善点 (a)締め付けリングの取り付け →保持力を大きく →トルクの増加 (b)スペーサの挿入 →磁石の吸引力によるロータ モータの改善点 改善点 (a)締め付けリングの取り付け →保持力を大きく →トルクの増加 (b)スペーサの挿入 →磁石の吸引力によるロータ 回転時の摩擦を低減 (b) (a) 図10 球面モータの改善 図11 締め付けリングとスペーサ
目次 背景,目的 モータの構成,駆動原理 測定結果 ●ロッドの変位測定結果 ●ロータの回転速度測定結果 まとめ,今後の課題
1方向への回転原理 (a) slow (b) rapid Current Time θ Time (a)緩やかな立ち上がり:ロータが微小回転 1方向への回転原理 ノコギリ波電流で励磁(X,Y,Z軸回転に共通) (a) slow (b) rapid Current Time B2 Displacement,Angle A1 A2 θ A1,A2,B1,B2 Time (a) slow deformation (b) rapid deformation 図6 ノコギリ波電流を流した時のロッドと変位の関係 (a)緩やかな立ち上がり:ロータが微小回転 (b)急な立下り: ロータの微小回転を保持したまま元へ戻る →繰り返すことで1方向へ回転が可能