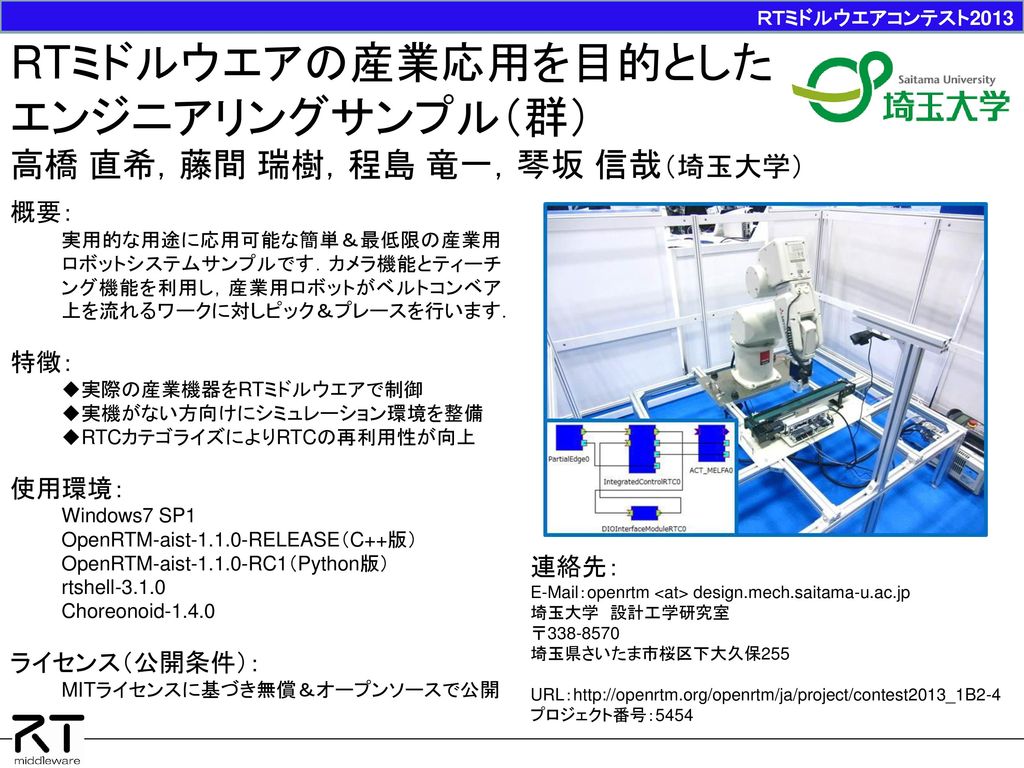
RTミドルウエアの産業応用を目的とした エンジニアリングサンプル(群) 高橋 直希,藤間 瑞樹,程島 竜一,琴坂 信哉(埼玉大学) RTミドルウエアコンテスト2013 RTミドルウエアの産業応用を目的とした エンジニアリングサンプル(群) 高橋 直希,藤間 瑞樹,程島 竜一,琴坂 信哉(埼玉大学) 概要: 実用的な用途に応用可能な簡単&最低限の産業用ロボットシステムサンプルです.カメラ機能とティーチング機能を利用し,産業用ロボットがベルトコンベア上を流れるワークに対しピック&プレースを行います. 特徴: 実際の産業機器をRTミドルウエアで制御 実機がない方向けにシミュレーション環境を整備 RTCカテゴライズによりRTCの再利用性が向上 使用環境: Windows7 SP1 OpenRTM-aist-1.1.0-RELEASE(C++版) OpenRTM-aist-1.1.0-RC1(Python版) rtshell-3.1.0 Choreonoid-1.4.0 ライセンス(公開条件): MITライセンスに基づき無償&オープンソースで公開 連絡先: E-Mail:openrtm <at> design.mech.saitama-u.ac.jp 埼玉大学 設計工学研究室 〒338-8570 埼玉県さいたま市桜区下大久保255 URL:http://openrtm.org/openrtm/ja/project/contest2013_1B2-4 プロジェクト番号:5454
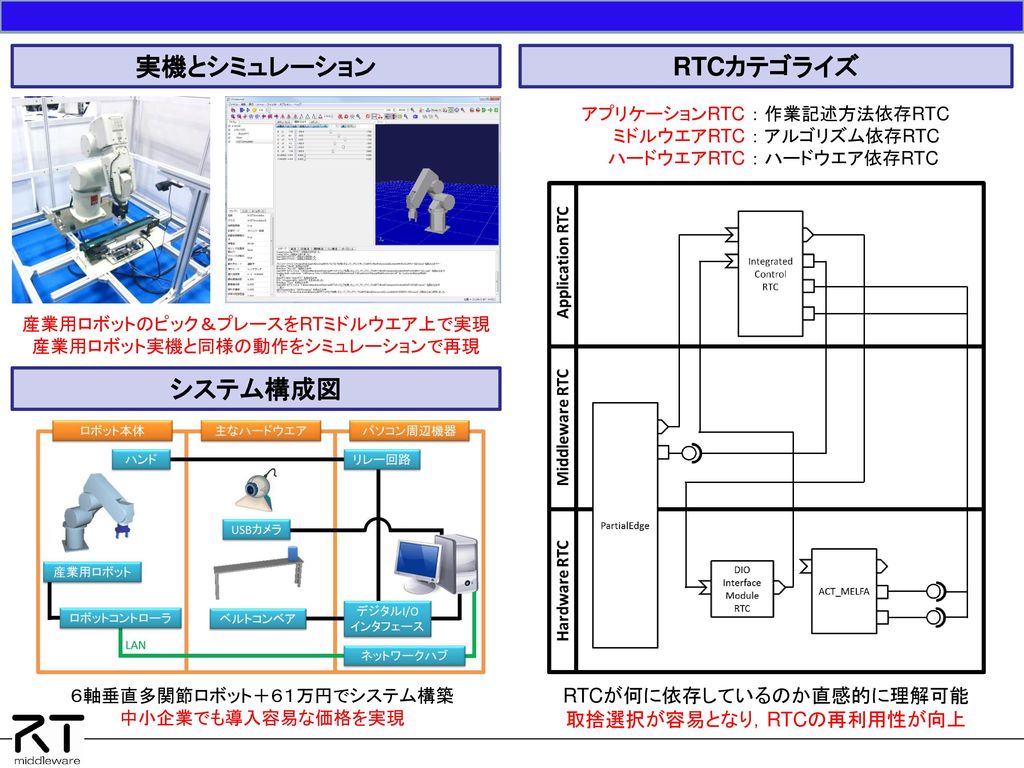
実機とシミュレーション RTCカテゴライズ システム構成図 産業用ロボット実機と同様の動作をシミュレーションで再現 システム構成図 6軸垂直多関節ロボット+61万円でシステム構築 中小企業でも導入容易な価格を実現 RTCが何に依存しているのか直感的に理解可能 取捨選択が容易となり,RTCの再利用性が向上