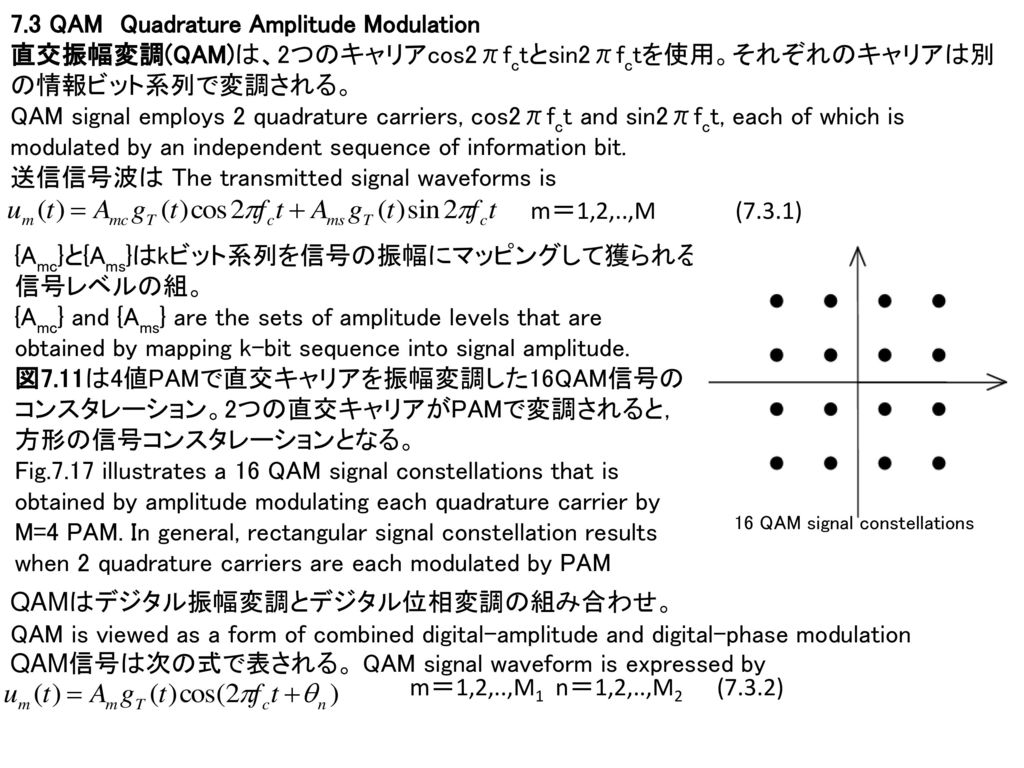
7.3 QAM Quadrature Amplitude Modulation 直交振幅変調(QAM)は、2つのキャリアcos2πfctとsin2πfctを使用。それぞれのキャリアは別の情報ビット系列で変調される。 QAM signal employs 2 quadrature carriers, cos2πfct and sin2πfct, each of which is modulated by an independent sequence of information bit. 送信信号波は The transmitted signal waveforms is m=1,2,..,M (7.3.1) {Amc}と{Ams}はkビット系列を信号の振幅にマッピングして獲られる信号レベルの組。 {Amc} and {Ams} are the sets of amplitude levels that are obtained by mapping k-bit sequence into signal amplitude. 図7.11は4値PAMで直交キャリアを振幅変調した16QAM信号のコンスタレーション。2つの直交キャリアがPAMで変調されると,方形の信号コンスタレーションとなる。 Fig.7.17 illustrates a 16 QAM signal constellations that is obtained by amplitude modulating each quadrature carrier by M=4 PAM. In general, rectangular signal constellation results when 2 quadrature carriers are each modulated by PAM 16 QAM signal constellations QAMはデジタル振幅変調とデジタル位相変調の組み合わせ。 QAM is viewed as a form of combined digital-amplitude and digital-phase modulation QAM信号は次の式で表される。 QAM signal waveform is expressed by m=1,2,..,M1 n=1,2,..,M2 (7.3.2)
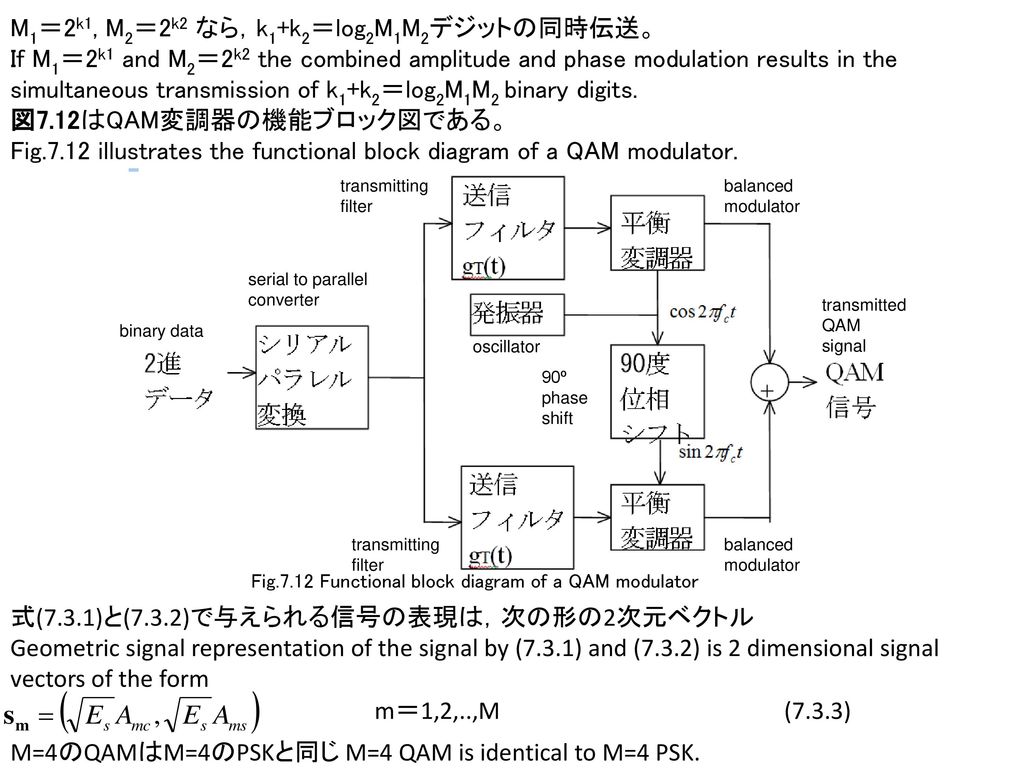
M1=2k1, M2=2k2 なら,k1+k2=log2M1M2デジットの同時伝送。 If M1=2k1 and M2=2k2 the combined amplitude and phase modulation results in the simultaneous transmission of k1+k2=log2M1M2 binary digits. 図7.12はQAM変調器の機能ブロック図である。 Fig.7.12 illustrates the functional block diagram of a QAM modulator. transmitting filter balanced modulator serial to parallel converter transmitted QAM signal binary data oscillator 90º phase shift transmitting filter balanced modulator Fig.7.12 Functional block diagram of a QAM modulator 式(7.3.1)と(7.3.2)で与えられる信号の表現は,次の形の2次元ベクトル Geometric signal representation of the signal by (7.3.1) and (7.3.2) is 2 dimensional signal vectors of the form m=1,2,..,M (7.3.3) M=4のQAMはM=4のPSKと同じ M=4 QAM is identical to M=4 PSK.
7.3.2 QAM変調の復調 Demodulation and Detection of QAM sampler ψ1(t) compute distance metrics clock 90º phase shift received signal output decision sampler ψ2(t) Fig. 7.13 Demodulation and Detection of QAM チャネルを通過する信号の伝送に,キャリア位相オフセットφがあると仮定。さらに,受信信号に加法性雑音が加わる。 Assume that a carrier phase offset is introduced in the transmission of the signal through the channel. In addition, the received signal is corrupted by additive Gaussian noise. このときr(t)は r(t) is expressed by (7.3.4)
受信信号は次の2つの基底関数と相関が取られる。 The received signal is correlated with 2 phase-shifted basis functions (7.3.5) 相関器出力は標本化され,判定器に送られる。 The output of correlators are sampled and passed to the detector 図7.13のPLLは受信信号のキャリア位相オフセットを推定し,位相シフトしたψ1(t)とψ2(t)のオフセットを補正。 The phase locked loop shown in Fig.7.13 estimates the carrier phase offset φ of the received signal and compensates for the offset by phase shifting as indicated (7.3.5). クロックは,相関器出力が適当な時間で標本化されるよう,受信信号と同期していると仮定 The clock is assumed to be synchronized to the received signal so that the correlator outputs are sampled at the proper instant in time. これらの条件下で2つの相関器の出力は Under these conditions, the outputs from the 2 correlators are (7.3.6) (7.3.7) 雑音成分は中央値0,分散N0/2を持つ相関のないガウス乱数。 Noise components are zero-mean, uncorrelated Gaussian random variables with variance N0/2 最適な判定器はユークリッド距離 The optimum detector compute the distance metrics m=1,2,..,M (7.3.8) を計算する。ここでrt=(rc,rs)でsmは式(7.3.3)で与えられる。 Where, rt=(rc,rs), and smis given by (7.3.3).
ユークリッド距離が最も短いsmを送信シンボルとして判定 Select sm which gives minimum distance as the transmitted symbol 7.3.3 AWGN伝送路でのQAMの誤り率 Probability of Error for QAM in an AWGN Channel 方形のコンスタレーションを持つ信号を使ったQAMシステムの性能 Performance of QAM system that employ rectangular signal constellation. QAM信号コンスタレーションは の信号点を持つ直交キャリア上の2つのPAM信号と同じ。 直交成分にある信号が復調で完全に分離されるので,QAMの誤り率はPAMの誤り率から決定できる。 QAM signal constellation is equivalent to 2 PAM signal on quadrature carriers, each having signal points. Because the signals in the phase quadrature components are perfectly separated the probability of error for QAM is determined from the probability of error for PAM. M値QAMシステムの正しい判定率は The probability of a correct decision for the M-ary QAM (7.3.9) はQAM信号の半分の平均電力を持つ 値PAMの誤り率。 is the probability of error of a ary PAM with one-half the average power in each quadrature signal of the equivalent QAM system M値PAMの誤り率を変形する。By appropriately modifying the probability of error for M-ary PAMr (7.1.18) (7.3.10) Eav/N0はシンボルあたりの平均SNR。M値QAMのシンボル誤り率は Eav/N0 is the average SNR per symbol. The probability of a symbol error for the M-ary QAM is
(7.3.11) この結果はkが偶数のM=2kについてのみ有効 This result is exact for M=2k when k is even. kが奇数の 値PAMシステムは存在しない。There is no equivalent ary PAM system シンボル誤り率の上限 Upper bounded symbol error probability (7.3.10) Eavb/N0はビットあたりの平均SNRであるEavb/N0is the average SNR per bit
から計算 Fig 7.14 is calculated by Fig. 7.14 Probability of a symbol error for QAM から計算 Fig 7.14 is calculated by
M-16QAM signal generator 例7.4 QAM信号 QAM simulation M=16QAM通信システムのモンテカルロシミュレーション Perform a Monte Carlo simulation of an M=16QAM communication system 4bit symbol Gaussian RNG M-16QAM signal generator Detector Gaussian RNG Compare Uniform RNG Symbol error counter 情報シンボル[b1,b2,b3,b4]系列を一様乱数発生器(RNG)を用いて発生。これを図7.16に示す信号点([Amc,Ams])にマッピング。 Uniform RNG generate the sequence of information symbol corresponding to the possible 4bit combination [b1,b2,b3,b4]. The information symbols are mapped into the corresponding signal points which have the coordinate ([Amc,Ams]) 雑音成分[nc ns]を2つのガウス過程によって発生。伝送路の位相シフトφは0とする。 2 Gaussian RNG generate the noise components [nc ns]. The channel phase shift is set to 0. 受信信号+雑音ベクトルは The received signal plus noise vector are 復調器は式(7.3.8)を計算し,rに最も近い信号点を決定。 誤り計数器は検出された系列でのシンボル誤りを数える。
Results for the transmission of N=10000 symbol at different SNR The detector computes the distance metric given by (7.3.8), and decides in favor of the signal point that is closest to the received vector r. The error counter counts the symbol error.. constellation for Monte Carlo Simulation Eb=Es/4はビットエネルギー Eb=Es/4 is bit energy Ser_16qamのコメント Comments for Ser_16qam 1シンボルあたりのエネルギー Energy per 1 symbol (1,1)→12+12=2,(1,3)→ 12+32=10, 32+12=10,32+32=18 平均のシンボルエネルギーは10 Average energy of symbol is 10 Eb=Es/4 → Eb/Noとシンボル誤り率の関係 Results for the transmission of N=10000 symbol at different SNR
理論誤り率プログラムのコメント Comments for theoretical probability of symbol error
7.4 通信システムにおける同期 Synchronization of the communication system キャリア同期:Carrier Synchronization PAM,PSK,QAMの復調ではキャリアの周波数と位相情報が必要。 復調器でキャリアと同じ位相と周波数を持つ正弦波を発生させる。 Frequency and phase of carrier must be known to demodulate PAM, PSK, and QAM. In the receiver, sinusoidal wave that has the same frequency and phase must be generated キャリア同期系は位相ロックループ(PLL)によって実現される。 Phase locked loop offer the sinusoidal wave that has the same frequency and phase of the carrier. PLLは局部発振器の位相を制御する非線形フィードバック制御系。PLLは掛け算器,ローパスフィルタ(LPF),電圧制御発振器(VCO:Voltage controlled oscillator)から構成される。 PLL is a nonlinear feedback system that controls the phase generated by the local oscillator. PLL consists of a multiplier, LPF, and Voltage control oscillator. PLLの入力x(t)とVCOの出力y(t)を次のように表す。 x(t) and y(t) denote the input of PLL and the output of VCO. (7.4.1) (7.4.2) これらを掛け合わせると x(t) is multiplied by y(t) (7.4.3)
右辺第1項をローパスフィルタで取り除き,係数の0.5を省略する。ローパスフィルタの出力は First term in the right side is removed by a low-path filter. The coefficient is assumed to be omitted. The output of the low-path filter is expressed as (7.4.4) |F-f|と|θ-φ|が十分小さいとき If |F-f| and |θ-φ| are small sufficiently, (7.4.5) v(t)>0:VCOの周波数fを高くするか位相φを進ませる Increase frequency f or proceed phase φ generated by VCO v(t)<0:VCOの周波数fを低くするか位相φを遅らせる decrease frequency f or delay phase φ generated by VCO v(t)=0となるように制御すればF=f,θ=φとなって搬送波が再生できる。 If we control f and φ so as to be v(t)=0, we can generated the carrier with F=f and θ=φ
例7-5 PLLによる同期 Synchronization by PLL VCOの初期周波数を500Hz,入力を600Hzの矩形パルスとする。 Initial frequency generated by VCO is set to 500Hz. Input signal is a clock of 600Hz. 矩形パルスに同期した正弦波を再生する。標本時間間隔を1μsとしローパスフィルタとVCOは図7.19のように構成。 Here, our purpose is to generate a sinusoidal wave synchronized with the clock. The sampling interval is set to 1μs. Block diagrams of LPF and VCO are shown in Fig.7.19 図7.19 ローパスフィルタとVCO Block diagram of LPF and VCO フィルタの係数aを0<a<1とするとローパスフィルタとなり,1に近いほど高い周波数成分の除去作用が大きくなる。bはフィルタの利得を決定。ここではa=0.99, b=0.02とする。 If coefficient a was 0<a<1, the filter operates as LPF. When coefficient a is increased toward 1, high frequency component are attenuated. Parameter b controls the gain. We set a=0.99 and b=0.02 VCOのsin(・)ブロックは入力xについて を計算。 Block sin(・) in VCO calculate . x is the input. c0は正弦波の周波数を決める定数で,標本間隔T,正弦波の周波数をF0とすれば c0 decides the sinusoidal frequency. When the sampling interval and the sinusoidal frequency are denoted by T and F0,
Reproduction of the sinusoidal wave synchronized by the clock VCOのsin( )ブロックに入る位相φ[n]は差分方程式を使うと Input φ[n] to sin () in the VCO is expressed by the differential equation v[n]>0の場合はφ[n]が進み,v[n]<0の場合は位相φ[n]が遅れる。 When v[n]>0, φ[n] increases. When v[n]<0, φ[n] decreases. 矩形波からの正弦波再生 Reproduction of the sinusoidal wave synchronized by the clock