自律型ロボットの プログラミング学習 この授業は、競輪の補助金を受けて実施します。 財団法人コンピュータ教育開発センター
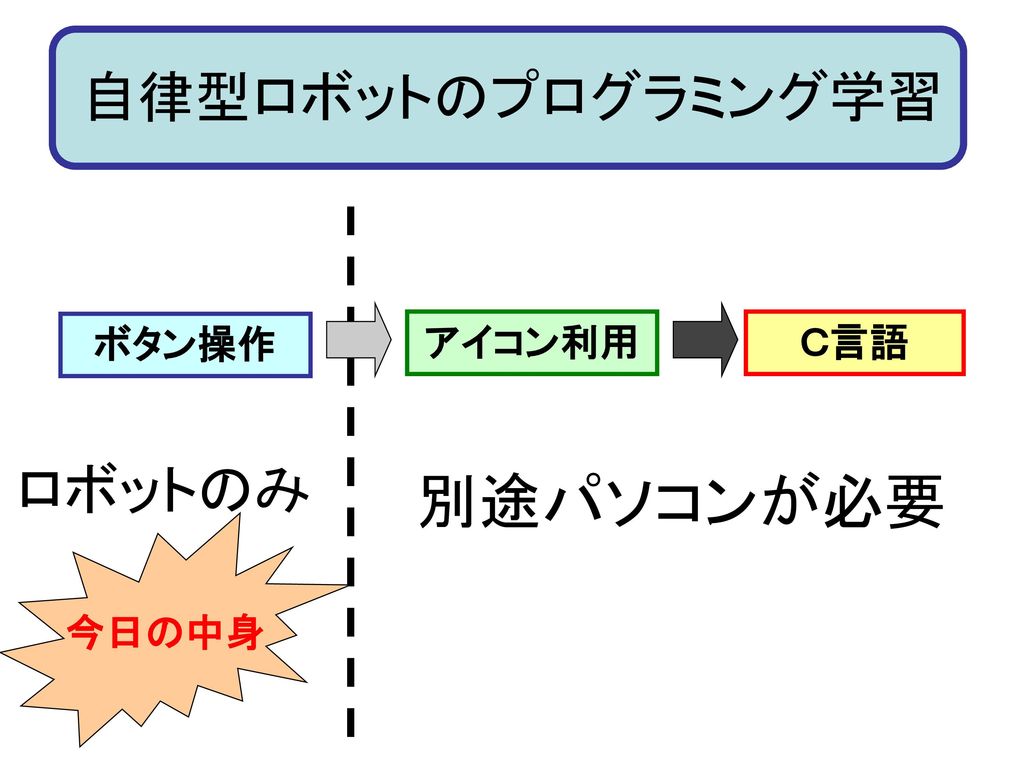
自律型ロボットのプログラミング学習 ボタン操作 アイコン利用 C言語 ロボットのみ 別途パソコンが必要 今日の中身
各部の名称 ディスプレイ >ジッコウモード プログラムモード オン 電源スイッチ オフ 上下ボタン ・項目の選択 ・数値の増減 OKボタン プログラムモード オン 電源スイッチ オフ OKボタン ・項目の決定 ・アクションの編集 ・次の設定項目へ CANCELボタン ・ひとつ前の画面に戻る SETボタン ・新アクションの挿入 ・ブラシのオンオフ ・実行ボタン DELボタン ・アクション削除 ・ひとつ前の設定項目に戻る
左タッチセンサ(センサ1) 右タッチセンサ(センサ2) 左赤外線センサ(センサ3) 右赤外線センサ(センサ4) 左タイヤ(モーター3) 右タイヤ(モーター1) お掃除ブラシ(モーター2)
※赤ボタンで右の列へ移動 ※青ボタンで左の列へ戻る ジッコウモード キイロヲオストスタート 赤ボタン プログラムモード ツウジョウ プログラム作成 青ボタン ループセッテイ クリカエスorクリカエサナイ センサ1 プログラム プログラム作成 センサ2 セッテイ ツカウ イジョウorイカ センサ3 ※赤ボタンで右の列へ移動 ※青ボタンで左の列へ戻る センサ4 センサ5 センサ6 センサ1 0000 センサ2 0000 センサ3 4000 センサ4 4000 センサ5 4000 センサ6 4000 センサモード モータースピード セッテイ モーター1 065 モーター2 100 モーター3 065 モーター4 065 ブザーセッテイ サウンド オン オンテイ 06 オートデモ マイコンショキカ
プログラミング学習 基本プログラミング 1)動作の基本学習(センサ未使用) 2)タッチセンサの基本学習 応用プログラミング 1)動作の基本学習(センサ未使用) 2)タッチセンサの基本学習 応用プログラミング 3)赤外線センサを使いライントレースに挑戦
オートデモのスタート
1-1.オートデモをスタートする. >ジッコウモード プログラムモード ブザーセッテイ >オートデモ (1)初期画面 (2)下ボタンを5回押しオートデモに矢印をあわせてから赤ボタンを押す ブザーセッテイ >オートデモ (3)黄色ボタンを押すとプログラムがスタートします キイロ ヲ オスト スタート ※青ボタンでプログラムをストップし、 もう一度青ボタンを押すと初期画面になります
オートデモでは以下の動作を行います。 (1)どのセンサも反応していないとき ・前進しながらお掃除ブラシを回す (2)タッチセンサが反応したとき ・後退し、方向を変える (3)赤外線センサが反応したとき
後ろに3秒進んで止まる プログラムの作成
(プログラムモード、ツウジョウモードに合わせる) 2-1.ツウジョウモードで「ウシロ」に進ませる. (プログラムモード、ツウジョウモードに合わせる) >ジッコウモード プログラムモード (1)初期画面 (2)下ボタンを1回押しプログラムモードに矢印をあわせてから赤ボタンを押す ジッコウモード >プログラムモード (3)矢印を上下に動かしツウジョウとセンサ1~センサ6の項目があることを確認する。 ※ツウジョウとはセンサ1~センサ6が何も反応していないときの行動を設定する項目です。センサ1~センサ6は各センサが反応したときの行動を決定する項目です。 各項目の行動を決める=皆さんの挑戦するプログラム > ツウジョウ センサ1
2-2.ツウジョウモードで「ウシロ」に進ませる. (動作を登録する) > ツウジョウ センサ1 (4)ツウジョウに矢印を合わし赤ボタンを押す (5)プログラムに矢印を合わせ赤ボタンを押す >プログラム ループセッテイ 動作を設定 マエ ウシロ ミギ ヒダリ トマル (6) >01 マエ * 05.0 動作の時間を設定 お掃除ブラシON(*) OFF(マークなし) ※状態が「ツウジョウ」の時「マエ」という行動を5.0秒続ける (7)赤ボタンを押すたびに各項目が左から順に点滅する。点滅している場所を上下ボタンで設定することができる。また動作設定部分が点滅している際に黄色ボタンを押すことにより、お掃除ブラシの回転ON/OFFを切り替えることができる >01 マエ * 05.0
2-3.ツウジョウモードで「ウシロ」に進ませる. (動作を登録する) >01 ウシロ 05.0 (8)赤ボタンでマエを点滅させ、上下ボタンでウシロを選択 (9) ウシロが点滅している際、黄色ボタンを押し、お掃除ブラシを回す設定に切り替える。「ウシロ」の後にマークが出たことを確認する >01 ウシロ * 05.0 (10)赤ボタンを2回押し動作時間の1の位を点滅させ、上下ボタンで0.30に設定する >01 ウシロ 03.0 (11)青ボタンを押し、点滅状態を解除する >01 ウシロ * 03.0
2-4.ツウジョウモードで「ウシロ」に進ませる. (ツウジョウモードの繰り返し設定) >プログラム ループ セッテイ (12)設定が終了したので、もう一度青ボタンを押し、一列左に戻る (13)ループセッテイを選択し赤ボタンを押す プログラム >ループ セッテイ (14)「ツウジョウ」の状態の動作を繰り返すか繰り返さないかを選択する。ここではクリカエサナイを選択する ツウジョウ モーション ヲ クリカエサナイ (15)青ボタンを3回押し、3列左に戻る。このとき編集したプログラムが自動的に保存される モーションホゾンチュウ デンゲンヲキラナイデ
2-5.ツウジョウモードで「ウシロ」に進ませる. (プログラムの実行) >ジッコウモード プログラムモード (16)今作ったプログラムを作成するためにジッコウモードに矢印を合わし赤ボタンを押す (17)黄色ボタンを押し、プログラム実行を押す キイロ ヲ オスト スタート (18)beautoが後ろに3秒間下がる ジッコウチュウ ……. ウシロ 1.8 (19)青ボタンを1回押し、1列左に戻る。 >ジッコウモード プログラムモード
前進後退を繰り返す プログラムの作成
3-1.ツウジョウモードで「前進後退」を繰り返す (動作の追加) >プログラム ループ セッテイ (1)プログラムモード→ツウジョウ→の順に赤ボタンで進み、プログラムを選択し赤ボタンを押す (2)ウシロを点滅させ、黄色ボタンを押し(*)マークを消す。消すことによりお掃除ブラシが回らなくなる その後もう一度赤ボタンを押し、動作時間を01.0秒に設定した後、青ボタンで点滅を解除する >01 ウシロ (*) 01.0 ↑*を消去 (3)点滅を解除したことを確認してから黄色ボタンを押すと次の動作設定(02番の)行を作る。※間違えて03番、04番以降を出してしまった場合はその行を矢印で選択し、緑を押すと、その行を削除します 01 ウシロ 01.0 >02 マエ 05.0 (4)02番の行の動作時間を01.0秒に設定した後、青ボタンで1列左に戻る 01 ウシロ 01.0 >02 マエ 01.0
3-2.ツウジョウモードで「前進後退」を繰り返す (ツウジョウモードの繰り返し設定) プログラム >ループ セッテイ (5)ループ セッテイを選択し、赤ボタンを押す (6)クリカエスに設定する ※クリカエスを選択することにより先ほどプログラムを行った01番の行と02番の行を繰り返す設定となる ツウジョウ モーション ヲ クリカエス (7)青ボタンを3回押し、一番左の列まで戻る。プログラムは先ほどと同じように、自動的に保存される。 モーションホゾンチュウ デンゲンヲキラナイデ (8)ジッコウモードでプログラムを実行し、前進後退動作を繰り返すことを確認する >ジッコウモード プログラムモード
センサ感度の確認
左タッチセンサ(センサ1) 右タッチセンサ(センサ2) 左赤外線センサ(センサ3) 右赤外線センサ(センサ4) 左タイヤ(モーター3) 右タイヤ(モーター1) お掃除ブラシ(モーター2)
4-1.各センサの感度を確認する (タッチセンサの感度の確認) >ジッコウモード プログラムモード プログラムモード (1)初期画面 (2)下を2回押し、センサ モードを選択し赤ボタンを押す プログラムモード >センサ モード (3)タッチセンサ(センサ1(左)とセンサ2(右))の値を確認する。 ・タッチセンサを押していない時、数字が0であることを確認し、値をメモしておく ・タッチセンサを押した時、数字が4000前後であることを確認し、値をメモしておく センサ1 0000 >センサ2 4092
4-2.各センサの感度を確認する (赤外線センサの感度の確認) センサ3 0244 >センサ4 2769 (4)赤外線センサ(センサ3(左)とセンサ4(右))の値を確認する。 ライントレースのコースの白い部分が赤外線センサの下にある時、数字が100~400前後であることを確認し、値をメモしておく ライントレースのコースの黒い部分が赤外線センサの下にある時、数字が1500~3000前後であることを確認し、値をメモしておく センサ3 0244 >センサ4 2769
タッチセンサを使った プログラム
(プログラムモード→センサ1 に合わせる) 5-1.タッチセンサを使う (プログラムモード→センサ1 に合わせる) >ジッコウモード プログラムモード (1)初期画面 (2)プログラムモードを選択し赤ボタンを押す ジッコウモード >プログラムモード (3)センサ1を選択し赤ボタンを押す ツウジョウ >センサ1 >センサ1 プログラム センサ1 セッテイ (4)センサ1 プログラムを押し赤ボタンを押す
5-2.タッチセンサを使う (センサ1の動作設定、感度設定を行う) >01 ヒダリ 03.0 センサ1 プログラム >01 ヒダリ 03.0 (5)動作設定を ヒダリ 動作時間を3.0秒に設定する。 (6)青ボタンで1列左に戻り今度はセンサ1 セッテイを選択し赤ボタンを押す センサ1 プログラム >センサ1 セッテイ (7)ツカウを選択し、赤ボタンを押す センサ1 ヲ ツカウ (8)センサ1 の現在の値をXとすると、センサ1がX以上の数値の時に「センサ1 プログラム」の項目での動作設定を実行するように、Xの値を決定する。決め方は次のページ参照 ※[0000]部分は現在のセンサ1の値を示しています。試しにセンサ1(左タッチセンサ)をONにしてみてください。カッコ内の値が4-1(3)で行ったように変化します。 センサ1 ガ [0000] X イジョウ ノトキ
(9)感度調整(10)センサ2の動作設定(11)プログラムの実行 5-3.タッチセンサを使う (9)感度調整(10)センサ2の動作設定(11)プログラムの実行 (9)値Xを決める。4-1(3)でメモしたセンサの値を確認する(タッチセンサがonの場合とoffの場合)。2つの数値の真ん中付近の値がXの値となる。 センサ1 ガ [0000] 2046 イジョウ ノトキ Xの設定例 ※上記の設定では、センサ1の値が2046 以上に変化した時、つまりタッチセンサが ONになった時、5-2(5)で登録した動作を beautoが実行します。 タッチセンサON: 4092 X=2046 タッチセンサOFF:0000 >01 ミギ 03.0 (10)同様にセンサ2の動作設定を ミギ 動作時間を3.0秒に設定する。 (11)ジッコウモードでプログラムを実行し、タッチセンサの反応がないときは、前進後退を繰り返し、右のタッチセンサが反応した場合は右旋回、左のタッチセンサが反応した場合は左旋回を行うことを確認する >ジッコウモード プログラムモード
ライントレースに挑戦 コースを1周しよう できた人は.1周にかかる時間をできるだけ縮めよう
白い部分 黒線 センサ3 ガ [2512] X イジョウ ノトキ 項目で登録した動作をbeautoが実行します。 ライントレースを行うためにどのような動作を設定すればよいか 考え、その動作をセンサ3(左),センサ4(右)に登録していく。 また、5章のタッチセンサの操作と同様に、赤外線センサの値の 変化を感知し、動作を実行するように設定する センサ3 ガ [2512] X イジョウ ノトキ Xの設定例 ライントレースのコースの黒い部分: 2512 X=1166 ライントレースのコースの白い部分:0180 ※上記の設定では、センサ1の値が2046 以上に変化した時、「センサ3 プログラム」 項目で登録した動作をbeautoが実行します。 白い部分 黒線
どのようなプログラムを作るか ツウジョウ センサ3 センサ4 ※上図はbeautoを上から見た設定になります。
END この授業は、競輪の補助金を受けて実施します。 企画制作 NPO法人 Multimedia Educational Forum 協力 ヴイストン株式会社 この授業は、競輪の補助金を受けて実施します。 財団法人コンピュータ教育開発センター