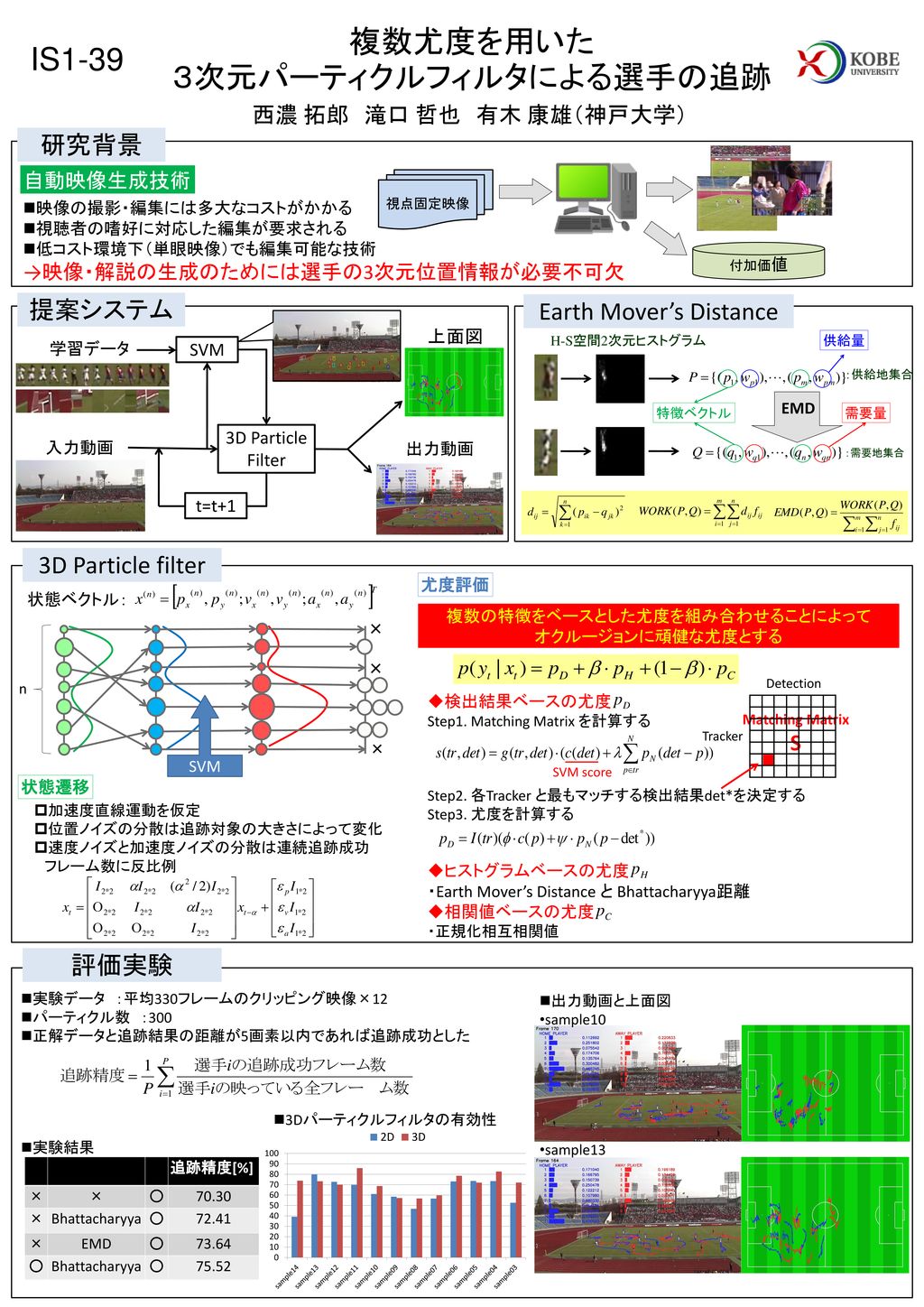
複数尤度を用いた 3次元パーティクルフィルタによる選手の追跡 IS1-39 複数尤度を用いた 3次元パーティクルフィルタによる選手の追跡 IS1-39 西濃 拓郎 滝口 哲也 有木 康雄(神戸大学) 研究背景 自動映像生成技術 視点固定映像 映像の撮影・編集には多大なコストがかかる 視聴者の嗜好に対応した編集が要求される 低コスト環境下(単眼映像)でも編集可能な技術 →映像・解説の生成のためには選手の3次元位置情報が必要不可欠 付加価値 提案システム Earth Mover’s Distance 上面図 H-S空間2次元ヒストグラム 供給量 学習データ SVM :供給地集合 EMD 特徴ベクトル 需要量 3D Particle Filter 入力動画 出力動画 :需要地集合 t=t+1 3D Particle filter 尤度評価 状態ベクトル: 複数の特徴をベースとした尤度を組み合わせることによって オクルージョンに頑健な尤度とする × n SVM Detection 検出結果ベースの尤度 Step1. Matching Matrix を計算する Step2. 各Tracker と最もマッチする検出結果det*を決定する Step3. 尤度を計算する ヒストグラムベースの尤度 ・Earth Mover’s Distance と Bhattacharyya距離 相関値ベースの尤度 ・正規化相互相関値 Matching Matrix S Tracker SVM score 状態遷移 加速度直線運動を仮定 位置ノイズの分散は追跡対象の大きさによって変化 速度ノイズと加速度ノイズの分散は連続追跡成功 フレーム数に反比例 評価実験 実験データ :平均330フレームのクリッピング映像×12 パーティクル数 :300 正解データと追跡結果の距離が5画素以内であれば追跡成功とした 実験結果 出力動画と上面図 sample10 sample13 3Dパーティクルフィルタの有効性 追跡精度[%] × ○ 70.30 Bhattacharyya 72.41 EMD 73.64 75.52