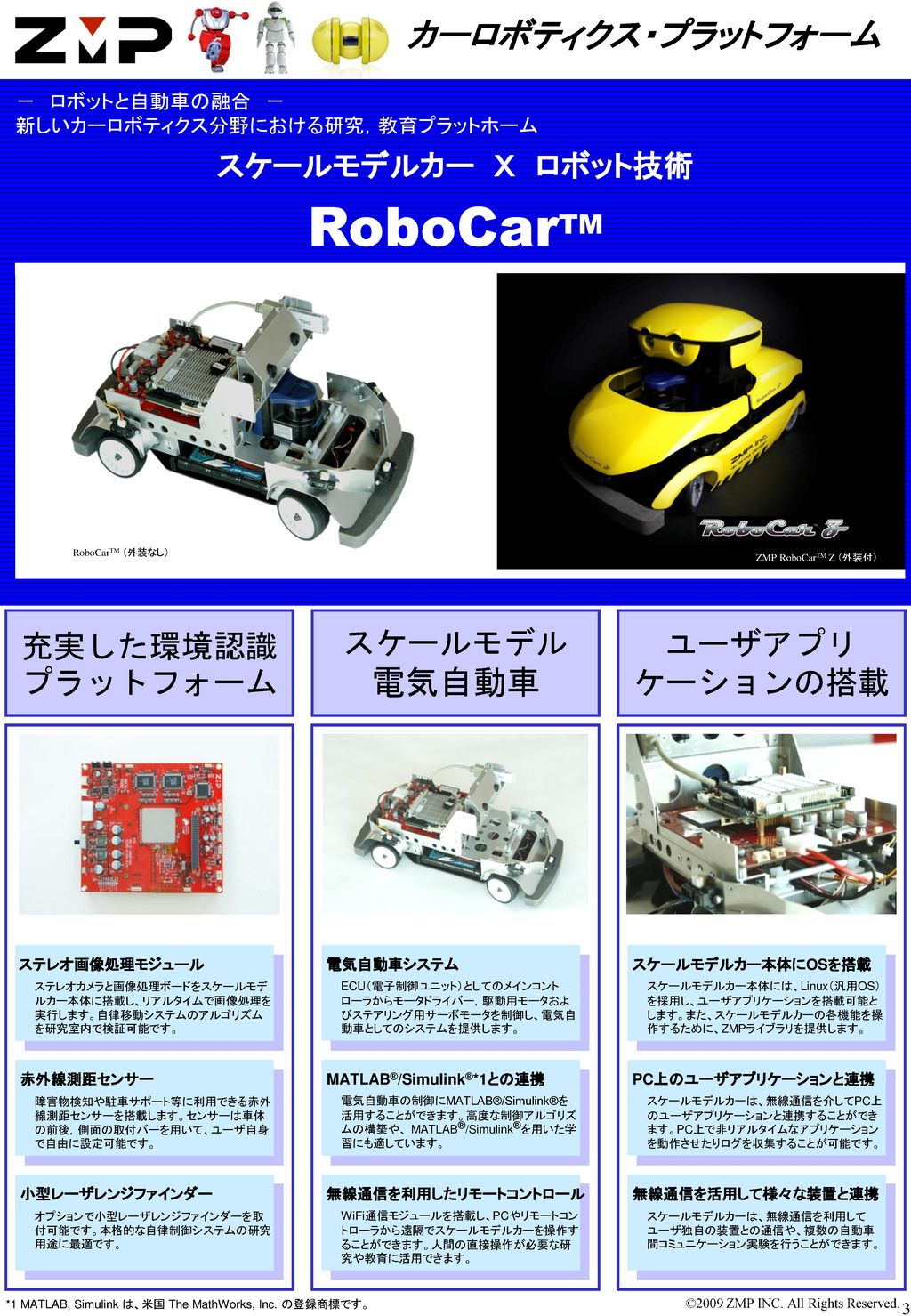
RoboCarTM カーロボティクス・プラットフォーム 電気自動車 充実した環境認識プラットフォーム スケールモデル ユーザアプリ - ロボットと自動車の融合 - 新しいカーロボティクス分野における研究,教育プラットホーム スケールモデルカー X ロボット技術 RoboCarTM RoboCarTM (外装なし) ZMP RoboCarTM Z (外装付) 充実した環境認識プラットフォーム スケールモデル 電気自動車 ユーザアプリ ケーションの搭載 ステレオ画像処理モジュール 電気自動車システム スケールモデルカー本体にOSを搭載 ステレオカメラと画像処理ボードをスケールモデルカー本体に搭載し、リアルタイムで画像処理を実行します。自律移動システムのアルゴリズムを研究室内で検証可能です。 ECU(電子制御ユニット)としてのメインコントローラからモータドライバー,駆動用モータおよびステアリング用サーボモータを制御し、電気自動車としてのシステムを提供します。 スケールモデルカー本体には、Linux(汎用OS)を採用し、ユーザアプリケーションを搭載可能とします。また、スケールモデルカーの各機能を操作するために、ZMPライブラリを提供します。 赤外線測距センサー MATLAB®/Simulink®*1との連携 PC上のユーザアプリケーションと連携 障害物検知や駐車サポート等に利用できる赤外線測距センサーを搭載します。センサーは車体の前後,側面の取付バーを用いて、ユーザ自身で自由に設定可能です。 電気自動車の制御にMATLAB®/Simulink®を活用することができます。高度な制御アルゴリズムの構築や、 MATLAB®/Simulink®を用いた学習にも適しています。 スケールモデルカーは、無線通信を介してPC上のユーザアプリケーションと連携することができます。PC上で非リアルタイムなアプリケーションを動作させたりログを収集することが可能です。 小型レーザレンジファインダー 無線通信を利用したリモートコントロール 無線通信を活用して様々な装置と連携 オプションで小型レーザレンジファインダーを取付可能です。本格的な自律制御システムの研究用途に最適です。 WiFi通信モジュールを搭載し、PCやリモートコントローラから遠隔でスケールモデルカーを操作することができます。人間の直接操作が必要な研究や教育に活用できます。 スケールモデルカーは、無線通信を利用してユーザ独自の装置との通信や、複数の自動車間コミュニケーション実験を行うことができます。 *1 MATLAB, Simulink は、米国 The MathWorks, Inc. の登録商標です。 3
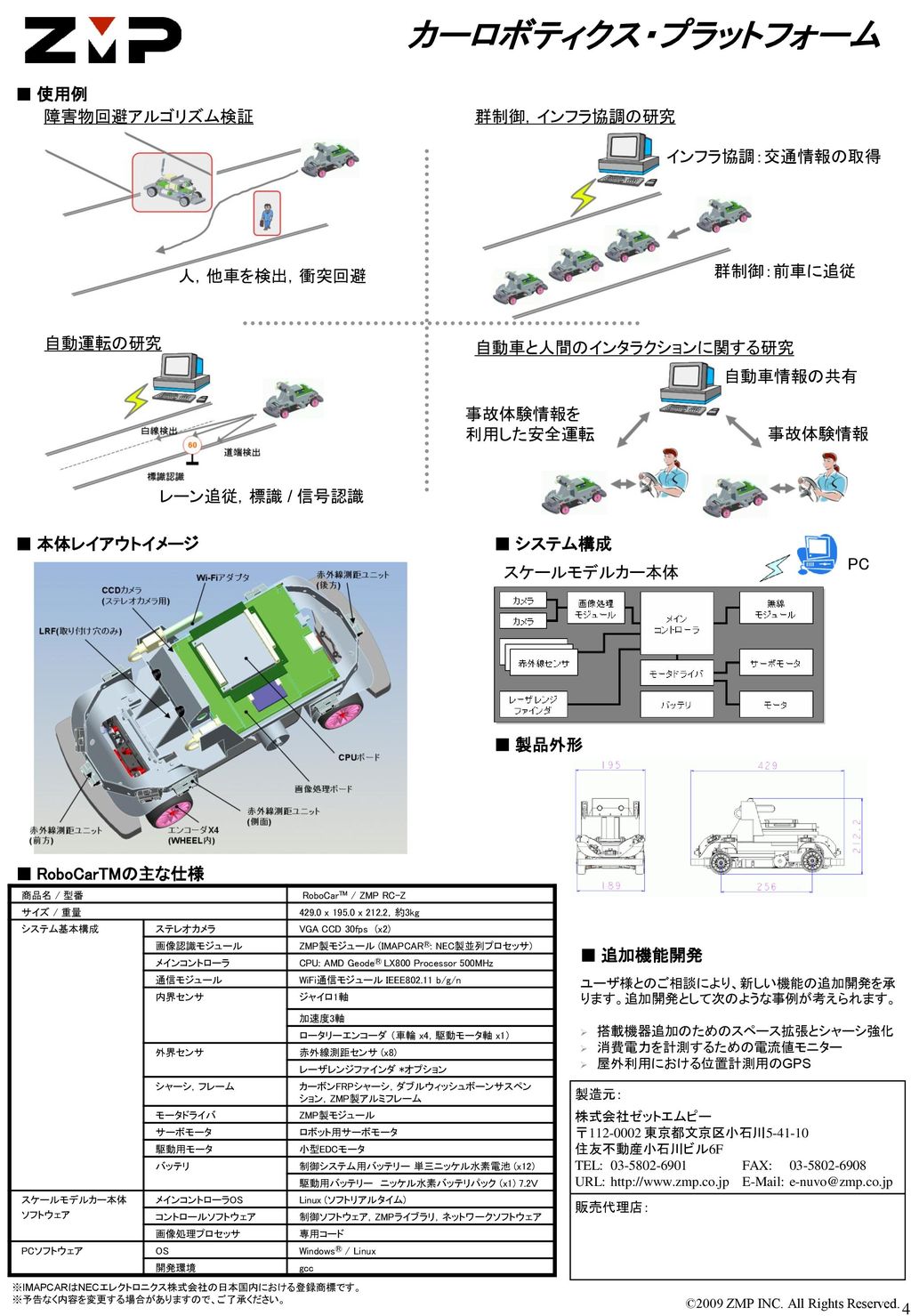
カーロボティクス・プラットフォーム ■ 使用例 障害物回避アルゴリズム検証 群制御,インフラ協調の研究 インフラ協調:交通情報の取得 群制御:前車に追従 人,他車を検出,衝突回避 自動運転の研究 自動車と人間のインタラクションに関する研究 自動車情報の共有 事故体験情報を 利用した安全運転 事故体験情報 レーン追従,標識 / 信号認識 ■ 本体レイアウトイメージ ■ システム構成 PC スケールモデルカー本体 ■ 製品外形 ■ RoboCarTMの主な仕様 商品名 / 型番 RoboCarTM / ZMP RC-Z サイズ / 重量 429.0 x 195.0 x 212.2,約3kg システム基本構成 ステレオカメラ VGA CCD 30fps (x2) 画像認識モジュール ZMP製モジュール (IMAPCARⓇ: NEC製並列プロセッサ) メインコントローラ CPU: AMD GeodeⓇ LX800 Processor 500MHz 通信モジュール WiFi通信モジュール IEEE802.11 b/g/n 内界センサ ジャイロ1軸 加速度3軸 ロータリーエンコーダ (車輪 x4,駆動モータ軸 x1) 外界センサ 赤外線測距センサ (x8) レーザレンジファインダ *オプション シャーシ,フレーム カーボンFRPシャーシ,ダブルウィッシュボーンサスペンション,ZMP製アルミフレーム モータドライバ ZMP製モジュール サーボモータ ロボット用サーボモータ 駆動用モータ 小型EDCモータ バッテリ 制御システム用バッテリー 単三ニッケル水素電池 (x12) 駆動用バッテリー ニッケル水素バッテリパック (x1) 7.2V スケールモデルカー本体 ソフトウェア メインコントローラOS Linux (ソフトリアルタイム) コントロールソフトウェア 制御ソフトウェア,ZMPライブラリ,ネットワークソフトウェア 画像処理プロセッサ 専用コード PCソフトウェア OS WindowsⓇ / Linux 開発環境 gcc ■ 追加機能開発 ユーザ様とのご相談により、新しい機能の追加開発を承ります。追加開発として次のような事例が考えられます。 搭載機器追加のためのスペース拡張とシャーシ強化 消費電力を計測するための電流値モニター 屋外利用における位置計測用のGPS 製造元: 株式会社ゼットエムピー 〒112-0002 東京都文京区小石川5-41-10 住友不動産小石川ビル6F TEL: 03-5802-6901 FAX: 03-5802-6908 URL: http://www.zmp.co.jp E-Mail: e-nuvo@zmp.co.jp 販売代理店: ※IMAPCARはNECエレクトロニクス株式会社の日本国内における登録商標です。 ※予告なく内容を変更する場合がありますので、ご了承ください。 4