Download presentation
1
動力学(Dynamics) 運動方程式のまとめ 2008.6.17
知能システム論1(9) 動力学(Dynamics) 運動方程式のまとめ 2008.6.17
 動力学(Dynamics) 運動方程式のまとめ. 2008.6.17.")
2
講義内容 1.はじめに 2.ベクトルの基礎 3.運動学(Kinematics) 4.動力学(Dynamics)まとめ 5.行列の演算と応用(Matrix) 6.軌道計算(Trajectory) 7.ロボットの制御(Control) 8.応用(Application)
 8.応用(Application)")
3
力のモーメント(回転力) 大きさ: 方向: 向き: n(r と F を含む面に垂直) 右ねじ n r |r|sinθ θ F
 大きさ: 方向: 向き: n(r と F を含む面に垂直) 右ねじ n r |r|sinθ θ F")
4
先端部における力と力のモーメントの効果 第 i 関節にかかる力のモーメント: 第 i 関節の回転力 Ti : F M P P-Pi Zi
Yi=pi Z0 X0 P1 Y0

5
ヤコビアン(係数行列)Jacobian J:ヤコビアン 上式を1つにまとめると次のようになる マニピュレータ先端の並進速度
マニピュレータ先端リンクの回転速度 上式を1つにまとめると次のようになる 自由度変数の 変化速度 先端の速度 J:ヤコビアン 例題のヤコビアン

6
T3,⊿θ3 P Fx, Fx, Fx ⊿x, ⊿y, ⊿z T2,⊿θ2 T1,⊿θ1 Z0 X0 P1 Y0

7
動力学(Dynamics) 逆動力学: リンクの位置、速度、加速度から関節トルクを求める。
逆動力学: リンクの位置、速度、加速度から関節トルクを求める。 順動力学: 関節トルクからリンクの加速度を求める。 ・逆動力学はロボットの制御に用い、順動力学はロボットの シミュレーションに用いる。 ・ここでは、主として逆動力学について述べる。順動力学は 逆動力学に基づき展開することができる。 はじめに例題の3関節(自由度)ロボットを取り上げ、 各リンクの質量が重心に集中している場合を扱い、 一般への展開はその後考える。
ロボットを取り上げ、 各リンクの質量が重心に集中している場合を扱い、 一般への展開はその後考える。")
8
運動方程式(Equation of Motion)
力とモーメント ベクトル リンク重心位置

9
各リンク重心の速度と加速度 回転速度ベクトル 回転加速度ベクトル

10
各リンクの力とモーメントの釣合い リンク3 関節3での力モーメントの釣合い リンク2 リンク1 関節トルク:

11
各リンクの運動方程式の一般形 :慣性テンソル 慣性主軸 X軸周りの慣性モーメント となる軸 リンク

12
オイラー(Euler)方程式 慣性主軸座標系でのオイラー方程式 慣性主軸 基準座標系でのオイラー方程式
方程式 慣性主軸座標系でのオイラー方程式 慣性主軸 基準座標系でのオイラー方程式")
13
オイラー(Euler)方程式
方程式")
15
オイラー(Euler)方程式(ベクトル表現)
角運動量の時間微分が力のモーメント 重心周りの角運動量

16
とすると。

17
重心周りの角運動量 慣性乗積がゼロのX,Y,Z軸を選ぶと、

18
慣性モーメントの計算 Z Y X

19
慣性モーメントの計算 R X Z Y

20
逆動力学の計算手順 1) 各リンクの姿勢と重心位置(θ:given) 2) 各リンク重心の速度・回転速度( :given)
4) 各リンクの運動方程式 5) 各関節に加わる力・モーメントベクトル(Fi,Mi) 6) 各関節のトルク(Ti) 1)~3)はベースから手先へ、 4)~6)は手先からベースの向きに漸化式を立てる
 各リンクの運動方程式. 5) 各関節に加わる力・モーメントベクトル(Fi,Mi) 6) 各関節のトルク(Ti) 1)~3)はベースから手先へ、 4)~6)は手先からベースの向きに漸化式を立てる.")
21
演習問題 右の2リンクからなる 水平多関節ロボット について問い に答えよ。 各リンクの質量 m1、m2は 重心に集中して いるものとする。
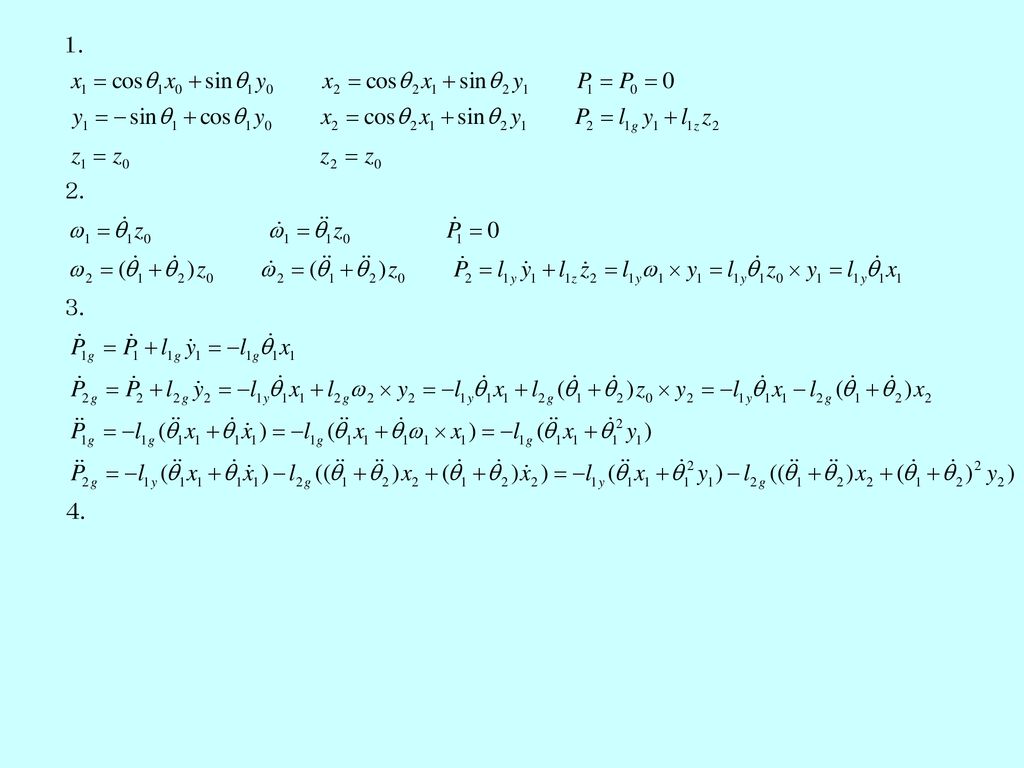
レポート提出期限 7月1日(火) 1.ロボットの位置姿勢xi,yi,zi,Piを求めよ。 ただし、 のときxi,yi,ziは 基準座標系x0,y0.z0と一致するものとする。 2.各リンクの回転速度ベクトルと関節位置 速度を求めよ。 3.各リンクの重心の加速度ベクトルを求めよ。 4.各リンクの運動方程式を求めよ。 5.各関節トルクを求めよ。
 1.ロボットの位置姿勢xi,yi,zi,Piを求めよ。 ただし、 のときxi,yi,ziは. 基準座標系x0,y0.z0と一致するものとする。 2.各リンクの回転速度ベクトルと関節位置. 速度を求めよ。 3.各リンクの重心の加速度ベクトルを求めよ。 4.各リンクの運動方程式を求めよ。 5.各関節トルクを求めよ。")
23
順動力学(Forward Dynamics)
順動力学: 関節トルクから自由度の加速度を求める。 ロボットのシミュレーションなどに用いる。 慣性行列 として逆動力学で求める 問題はAの定式化!

24
の時の逆動力学 順運動学:慣性行列の求め方

25
上の式展開での 記号の順序入換 のとき スカラー三重積の性質を用いた式変形 A B C C A B

26
慣性行列


 変換を復元す る問題である。 例えば: 2 台のステレオカメラから得られた3次元情報の間の関 係を推定する問題。 2 台のステレオカメラから得られた3次元情報の間の関.>")

 講師:幹 浩文( A314) TA :西方良太 M 1 ( A305 ) A 1 03 ( 10 : 50~12 : 20 ) 【金】 https://www.wakayama-u.ac.jp/~hjs/bibun_bekutorukaiseki -201https://www.wakayama-u.ac.jp/~hjs/bibun_bekutorukaiseki.>")
 左 列 中列 右列 前で3章宿題、アンケートを提出し、 3章小テスト問題、4章講義レポート課題を受け取り、>")






>")
 4,5限 2.場所: 1331番教室 3.試験範囲:講義・演習・宿題・教科書の8章までに学んだ範囲>")
 本時の流れ ねらい「グラフや座標など与えられた条件をもとに一次 関数の式を求める。」 ↓>")
を基に作成されている.>")
 ~第5章 ラプラス変換と総仕上げ~>")


 4,5限 2.場所: 1331番教室 3.試験範囲:講義・演習・宿題・教科書の8章までに学んだ範囲>")

