多自由度を有するロボットに関する 操作システムの提案 室蘭工業大学 情報工学科認知ロボティクス研究室所属 池田憲弘
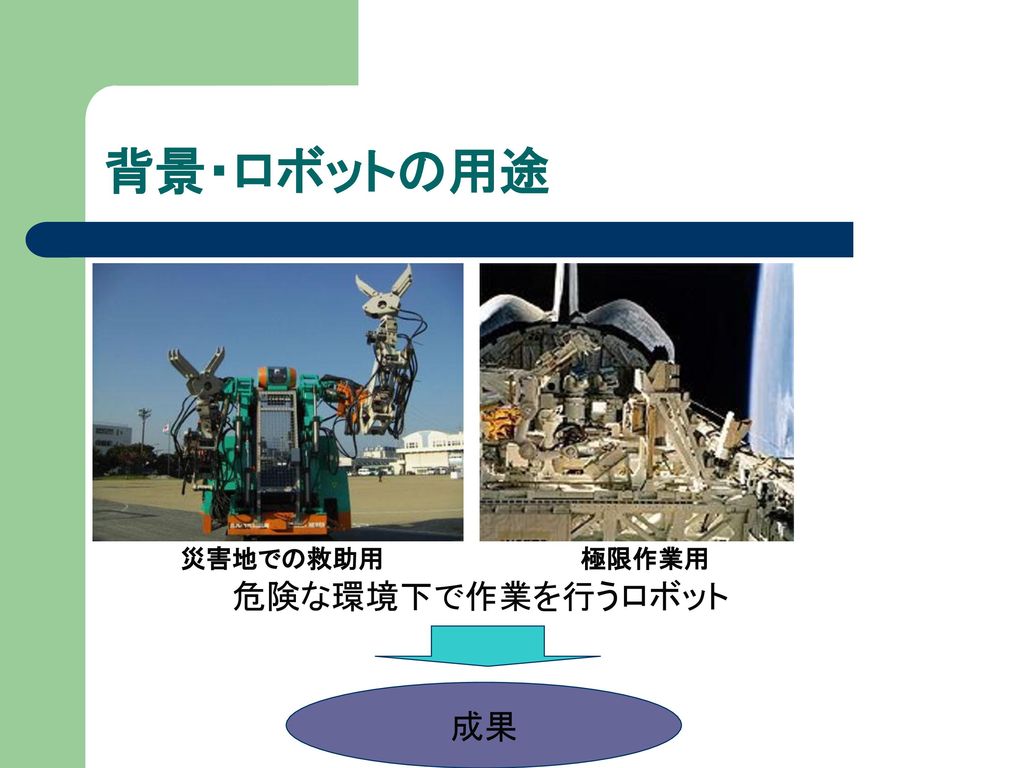
背景・ロボットの用途 危険な環境下で作業を行うロボット 成果 災害地での救助用 極限作業用 まず,本研究の背景としまして,現在ロボットの用途の一つとして,極限作業用ロボット,災害地での救助支援用ロボットなど,人が入り込みにくい危険な環境下で作業を行うロボットがあり,成果をあげています. 災害地での救助用 極限作業用 危険な環境下で作業を行うロボット 成果
背景・環境とロボット 工業用ロボットなど 単純な環境 単純なタスク 災害地での救助用ロボットなど 複雑な環境 複雑なタスク このような災害地での救助用ロボットなどは,単純な環境で単純なタスクを要求される工業用ロボットなどとは違って, 複雑な環境で複雑なタスクを要求されることが多くあります. 災害地での救助用ロボットなど 複雑な環境 複雑なタスク
背景・ロボット操作の複雑さ 複雑な環境 多自由度 複雑なタスク 多センサを有する ロボット オペレータの 複雑な操作 負担増大 簡単に しかし,そのような複雑な環境下でさまざまなタスクを行うためには,多自由度,多センサを有するロボットが必要になります.このようなこのようなロボットの操作は非常に複雑になり,これはオペレータの負担の増加につながります. そこで複雑な操作に着目します.簡単に思い通りに操作することが出来れば,オペレータの負担軽減につながり,複雑な環境下での作業を楽にすることが出来ます. 簡単に 思い通りに 操作 オペレータの 負担軽減
ロボットの操作・入出力 ロボット 必要な情報が 大きく異なる センサ情報の 提示など 制御のための 情報など 入力 出力 人間 この時,人間とロボット間の情報のやりとりを考えると,人間からロボットへの場合へは必要な情報はロボット制御のための情報など, 逆にロボットから人間への場合には,ロボットのセンサ情報など,必要な情報が異なります. そのため,ロボットへの入力と出力を分けて考える必要があります. 今回は特に,人間からロボットへの入力について注目していきます. 人間 ロボットの入力と出力を分けて考える必要がある
ロボットへの入力 命令 対応関係 分類 オペレータ側操作システム ロボット側動作システム ロボットへの入力を考えたとき,例えば,人からロボットへの命令はどのような形で行うのか. オペレータ側操作システムとロボット側操作システムはどのように対応させるのか. といった問題が考えられます. そこで,命令と対応関係について,もう少し細かく分類を行います. 特に,システムの対応関係については,特にオペレータ側システムとロボット側システムの自由度の関係に注目します. 対応関係 オペレータ側操作システム ロボット側動作システム 分類
ロボットへの入力・分類・命令 設計型 ・あらかじめ必要な動きを設計 命令 ・命令に従って決まった動き メリット:操作が容易 デメリット:設計された動きしか出来ない ロボットへの入力について,まずロボット操作に関する命令方法について考えます.あらかじめ必要な動きを設計し,命令に従って決まった動きを行う方法を設計型命令.直接命令,操作し,状況によって自由な動きを行える方法を全操作型命令とし,操作方法を2つに大別します. 設計型命令の特徴は,操作が容易であるが,設計された動きしか出来ない. リアルタイム型命令の特徴は,操作が複雑になるが,自由な動きを作ることが出来るとなります. 全操作型 命令 ・直接操作 ・各自由度を動かす メリット:状況によって自由な動きを作ることが出来る デメリット:操作が複雑
命令・具体例・ラジコン ・車型 ・4輪 ・2自由度
命令・具体例 設計型 命令 一連の動きを行う 1
命令・具体例 全操作型 命令 自由に動かす
ロボットへの入力 命令 対応関係 分類 自由度の関係 オペレータ側操作システム ロボット側動作システム ロボットへの入力を考えたとき,例えば,人からロボットへの命令はどのような形で行うのか. オペレータ側操作システムとロボット側操作システムはどのように対応させるのか. といった問題が考えられます. そこで,命令と対応関係について,もう少し細かく分類を行います. 特に,システムの対応関係については,特にオペレータ側システムとロボット側システムの自由度の関係に注目します. 対応関係 オペレータ側操作システム ロボット側動作システム 分類 自由度の関係
≦ > ロボットへの入力・分類・自由度 操作側 ロボットの 1対1での システムの 自由度 対応が可能 自由度 メリット:操作が比較的容易 デメリット:自由度の増大にともなってシステムが複雑化 ロボットへの入力について,さらにロボットの自由度について考えます.ロボットの自由度がオペレータ側システムの自由度より小さければ,ロボットの自由度と操作側の自由度を1対1で対応させることが可能であるため,操作は比較的容易であると考えられます. 逆に,ロボットの自由度の方が大きければ,1対1での対応は出来なくなり,操作側の自由度1に対して複数個のロボットの自由度を操作することになり,操作は複雑化し,オペレータの負担増加につながります 1対1での 対応が不可能 ロボットの 自由度 > 操作側 システムの 自由度 メリット:可搬性 デメリット:操作の複雑化
自由度・具体例 ロボット側自由度 ≦ 操作側自由度 ロボット:2自由度 コントローラ:2自由度 1対1で対応可能
自由度・具体例 ロボット側自由度 > 操作側自由度 ロボット:6自由度 コントローラ:2自由度
自由度・具体例 ロボット側自由度 > 操作側自由度 ロボット:6自由度 コントローラ:2自由度 ? 自由度:1対多 操作が複雑
ロボットへの入力まとめ 設計型命令 全操作型命令 ≦ > ・操作が容易 ・決められた動きのみ ・操作は比較的容易 ・動きは自由に操作可能 人間があらかじめ 動きを設計する方法 全操作型命令 各自由度を 操作する方法 ロボット側自由度 ≦ 操作側自由度 ・操作が容易 ・決められた動きのみ ・操作は比較的容易 ・動きは自由に操作可能 ・システムの複雑化 > ・可搬性が高い ・操作が複雑 以上をまとめると,このようになります. 本研究では特に全操作型命令で,かつロボット側の自由度がオペレータ側の自由度より大きい場合に着目します
従来研究 簡易な入力装置を用いたヒューマノイドロボットの 全身遠隔操作システム(2004) システム:ロボットの自由度(30) > 操作側自由度(6) この点に注目した研究として,2004年に発表された簡易な入力装置を用いたヒューマノイドロボットの全身遠隔操作システム という研究があります. これは,システムとして,ロボットの自由度が30自由度,操作側自由度が6自由度の ロボットの自由度の方が操作側自由度よりおおきな場合において, 先に話しました全操作型命令でロボットの遠隔操作を行おうとする研究です. ロボットの遠隔操作 ボタンの切り替えにより,システムを実現
従来研究・問題点 オペレータが操作出来る場所を限定 (両手先,両足,腰,頭 : 計6箇所) その他の場所:固定,他に従属 (両手先,両足,腰,頭 : 計6箇所) その他の場所:固定,他に従属 両足についても,各自由度をすべて動かせるわけではない 設計型命令と全操作型命令の複合型
従来研究のアプローチ 設計型命令 全操作型命令 ≦ > 設計型命令と全操作型命令の複合型 ・操作が容易 ・決められた動きのみ 人間があらかじめ 動きを設計する方法 全操作型命令 各自由度を 操作する方法 ロボット側自由度 ≦ 操作側自由度 ・操作が容易 ・決められた動きのみ ・操作は比較的容易 ・動きは自由に操作可能 ・システムの複雑化 > ・可搬性が高い ・操作が複雑 設計型命令と全操作型命令の複合型
目的 操作システムの提案 ロボットの自由度 > 操作側の自由度 全操作型 人がロボットを簡単に,思い通りに操作するためのシステムを目指して 以上を背景にして,禅操作型かつロボットの自由度が操作側の自由度より大きいシステムについて, 人がロボットを簡単に,思い通りに操作するためのシステムの提案を目的とします. 操作システムの提案
アプローチ 設計型命令 全操作型命令 ≦ > 自由な動きを実現 ・操作が容易 ・決められた動きのみ ・操作は比較的容易 あらかじめ動きを 設計する方法 全操作型命令 各自由度を 操作する方法 ロボット側自由度 ≦ 操作側自由度 ・操作が容易 ・決められた動きのみ ・操作は比較的容易 ・動きは自由に操作可能 ・システムの複雑化 > ・可搬性が高い ・操作が複雑 以上をまとめると,このようになります. 本研究では特に全操作型命令で,かつロボット側の自由度がオペレータ側の自由度より大きい場合に着目します 自由な動きを実現
手法 分割 人 N > M ロボットの自由度 自由度N 切り替えることで 各自由度を 意識的に操作 操作システム 自由度M 自由度M 以上目的のアプローチとして,操作システムの自由度より大きいロボットの自由度を分割し,切り替えることでそれぞれを操作を操作することを考えました. 切り替えることで 各自由度を 意識的に操作 人 操作システム 自由度M N > M
手法の適用 実環境において,手法に即したシステム ロボットとジョイスティック ロボットの自由度 > ジョイスティックの自由度 手法の適用
実験概要 ジョイスティックを用いて,ロボットを遠隔操作するシステムの 作成を行った 入力 (ジョイス ティック) 出力 (行動) パソコン 実験としまして,ジョイスティックを用いて,ロボットを遠隔操作するシステムの作成を行いました. ジョイスティックからの入力をパソコンで受け取り,ロボットにそのデータを送信し,ロボットが行動するというものです. パソコンはジョイスティックからの 入力とロボットへの通信に用いる
実験に使用したロボット 名前 : SPC-001(Speecys) 身長/体重 : 50cm/3.7kg 自由度 : 23自由度 身長/体重 : 50cm/3.7kg 自由度 : 23自由度 センサー : 次に実験設定の説明に移ります.使用したロボットは 角度,温度,負荷(各サーボ) 三軸ジャイロセンサ,三軸Gセンサ CMOSカラーカメラ マイク(モノラル×2) その他 : LED(3色×2),スピーカー,無線LAN
実験に使用したジョイスティック 名前 : EXTREME 3D PRO(Logitech) 特徴 : アナログ3軸(自由度3) ボタン12個 特徴 : アナログ3軸(自由度3) ボタン12個 8方向ハットスイッチ スロットル PCとの接続方法 USB 次に,使用したジョイスティックは,
N個の自由度をすべて意識的に動かすことが出来る 卒論までの実験内容 ジョイスティック(操作側)の使用する自由度 : M SPC-001(ロボット)の使用する自由度 : N M<N かつ 全操作型 を満たす操作システムの実現 1≦M≦3, M<N≦23 ジョイスティックのボタンにより分割した自由度を切り替える N個の自由度をすべて意識的に動かすことが出来る システムの実現
中間発表・システムの作成 ロボット側自由度 > 操作側自由度の前段階 ロボット側自由度 = 操作側自由度のシステム作成 ジョイスティック ロボット側自由度 > 操作側自由度の前段階 ロボット側自由度 = 操作側自由度のシステム作成 ジョイスティック 腕の上げ下げ 実験詳細1として,ジョイスティックのレバーの軸の傾き加減がロボットの右腕の上げ下げに対応します. レバーの傾き加減 DOWN UP
中間発表用システム 分割 人 N > M ロボットの自由度 他の自由度は無効 自由度N 操作システム 自由度M 自由度M 以上目的のアプローチとして,操作システムの自由度より大きいロボットの自由度を分割し,切り替えることでそれぞれを操作を操作することを考えました. 人 操作システム 自由度M N > M
中間発表・ターゲットの限定 ロボット 右腕の1自由度 ジョイスティック アナログ1軸 ロボットの自由度 = ジョイスティックの自由度 今回の中間発表用に行った実験では,ターゲットを限定して行いました. ロボットについては右腕の1自由度のみ ジョイスティックについてはアナログの1自由度とボタン2個を使用しました. これにより,ロボットとジョイスティックの自由度を1:1に対応することが出来ます. アナログ1軸 ロボットの自由度 = ジョイスティックの自由度 1自由度に対する制御実験
中間発表・実験内容 思い通りに操作出来るか ジョイスティック 腕の制御 角度 詳細2として,ジョイスティックのボタン操作により,腕の制御方法が変化します. 通常状態では角度制御, ボタン1を押すことにより速度制御, ボタン2を押すことにより加速度制御となります. 角度
中間発表・実験内容 腕を下ろした状態 0度 176度 順番 タスク 目標角度 1 腕を上げる 123度 2 腕を下げる 72度 3 176度 4 0度 123度 72度 0度 2回行う Joystickの入力データ,サーボの角度データを取得
実験結果・角度制御 176度 123度 72度 0度
考察 ジョイスティックの動きがロボットに的確に伝えられている オペレータの意図した動きが出来ている
今後の方針 操作システム 自由度M 自由度M N > M 人 操作システム 自由度M 自由度M 他の自由度は無効 N > M 人
まとめ 中間発表までの成果 卒研発表の目標 ロボットとジョイスティックの自由度を1対1対応させた遠隔操作システムの作成 ジョイスティックの自由度以上の自由度を持つロボットの遠隔操作システムの作成
以上
人への情報提示・画面の表示 サーボ 状態 角度 負荷 温度 1番 S1 A1 L1 T1 2番 S2 A2 L2 T2 ・・・ 23番 Gセンサ X,Y,Z軸 (-477~477) ジャイロセンサ (-512~512) センサ 温度 T24 出力データはすべて整数
実行結果・モニタ画面
従来研究・問題点・詳細 例: 両足の場合 それぞれを動かす ことはできない 片足6自由度 動きの設計(歩く) 例: 両足の場合 それぞれを動かす ことはできない 片足6自由度 動きの設計(歩く) ロボットに与える入力は歩幅,歩行速度など
従来研究の手法 人 N > M 設計 ロボットの自由度 自由度N パラメータ 操作システム 自由度M 固定 従属 自由度M 自由度M 以上目的のアプローチとして,操作システムの自由度より大きいロボットの自由度を分割し,切り替えることでそれぞれを操作を操作することを考えました. 人 操作システム 自由度M N > M
自由度・システムの複雑化 ロボット側自由度 > 操作側自由度 ロボット側自由度 ≦ 操作側自由度 システムの複雑化 コントローラ:2自由度 ロボット:6自由度 コントローラ:6自由度 ロボット:6自由度 システムの複雑化
外骨格型マスタアームの例 センサーの値を取得 オペレータ側システム ロボット
自由度・可搬性 外骨格型マスタ・スレーブシステム マスタ ロボット 1対1 別種の ロボット マスタは各ロボットに 適した特殊な構造
自由度・可搬性 本研究のアプローチ マスタ ロボット マスタは一般的な入力装置 ロボットに関係なく ソフトウェアで対応可能 別種の ロボット
タスクの目標角度について
ブレイン・マシン・インタフェース 脳の活動を取得する
ブレイン・マシン・インタフェースの問題 侵襲式・・・・ 非侵襲式・・・ 頭部に直接電極を埋め込む 頭部に直接電極を埋め込む必要があり,手術が必要 ロボットをあやつるために訓練が必要 非侵襲式・・・ 脳波,脳血流などを用いる 設計型命令による操作 測定するためにMRIなどの計測デバイスが必要
中間発表・実験内容 ロボットの制御方法として,3種類用意各制御方法で思い通りに操作できるか ジョイスティック 腕の制御方法 角度 速度 1 ボタンの操作 詳細2として,ジョイスティックのボタン操作により,腕の制御方法が変化します. 通常状態では角度制御, ボタン1を押すことにより速度制御, ボタン2を押すことにより加速度制御となります. 角度 速度 1 2 加速度
実験結果・速度制御 176度 123度 72度 0度
実験結果・加速度制御 176度 123度 123度 123度 72度 0度
考察 ジョイスティックの動きがロボットに的確に伝えられている 各制御とも,オペレータの意図した動きが出来ている タスクによって操作しやすい制御方法が違うと思われるので切り替えを行えることが望ましい