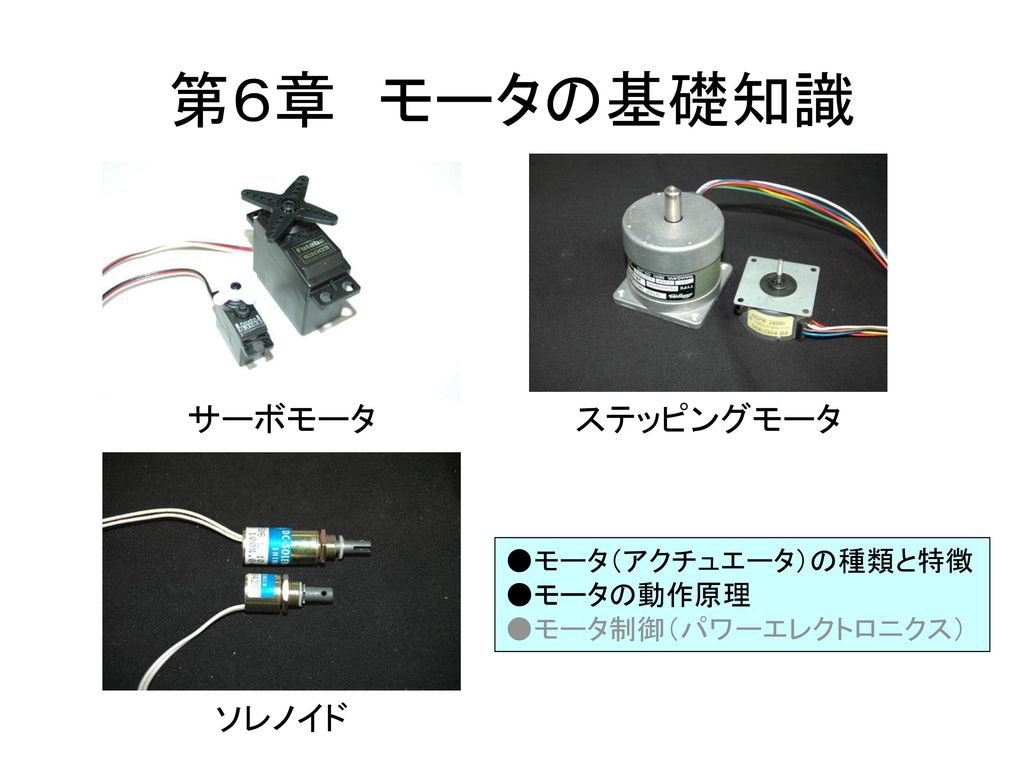
第6章 モータの基礎知識 サーボモータ ステッピングモータ ソレノイド ●モータ(アクチュエータ)の種類と特徴 ●モータの動作原理 第6章 モータの基礎知識 サーボモータ ステッピングモータ ●モータ(アクチュエータ)の種類と特徴 ●モータの動作原理 ●モータ制御(パワーエレクトロニクス) ソレノイド
港湾内の環境保全を目指した 内航船舶用排熱回収システムの開発 【研究紹介】 港湾内の環境保全を目指した 内航船舶用排熱回収システムの開発 排熱利用スターリングエンジン
●研究目的と概要 停泊している船舶のディーゼルエンジンから放出される排ガスが,港湾地域の大気環境汚染の原因となっている。 その対策は急務 東京湾 その対策は急務
●停泊中の船舶による環境汚染 東京都環境局 東京港内の年間排出量推計 停泊中の発電用ディーゼルエンジンを停止させるシステム 解決方法として・・・ 停泊中の発電用ディーゼルエンジンを停止させるシステム 陸上からの電力供給 年間34000隻が入港 自動車の約8倍! インフラ設備,導入コスト・・・ 排熱回収による発電・蓄電システム 低温排熱利用技術・・・
●排熱回収システム ★2 kWで2日間の蓄電 ★10 kW×10時間の利用 ●必要最小限の電力を貯蔵する。 ●設置スペースが小さい。 開発コンセプト ●必要最小限の電力を貯蔵する。 ●設置スペースが小さい。 ●既存船への設置が可能である。 ★2 kWで2日間の蓄電 ★10 kW×10時間の利用
●システム構成
平成17年度に開発した実験用スターリングエンジン ●実験用スターリングエンジンの構造 仕様および目標性能 ピストン径 100 mm ストローク(DP) 36 mm ストローク(PP) 28 mm 定格ガス圧力 3~4 MPa 定格ガス温度 280~300℃ 定格回転数 1000 rpm 目標出力 500 W ヒータ管材質 銅合金 再生器 SUS製積層金網 クーラ管材質 SUS304 発電機 誘導式 平成17年度に開発した実験用スターリングエンジン
●実験用スターリングエンジンの構造
●実験用スターリングエンジンの外観
●ディーゼルエンジン排ガスによる運転 ディーゼルエンジン仕様 ディーゼルエンジン ●H18/9/22より運転を実施中。 ディーゼル排気管 スターリングエンジン ディーゼルエンジン仕様 型式 MU323DGSC 立型4サイクル シリンダ数 3 シリンダ径 230 mm ストローク 380 mm 定格出力 350 PS (257 kW) 定格回転数 420 rpm ディーゼルエンジン
●実験結果の一例 ディーゼルエンジンのエネルギーバランス
スターリングエンジンのエネルギーバランス ●実験結果の一例 ●排熱エネルギーの回収効率を上げるためには? ●システムを完成させるためには? スターリングエンジンのエネルギーバランス
第6章 モータの基礎知識 サーボモータ ステッピングモータ ソレノイド ●モータ(アクチュエータ)の種類と特徴 ●モータの動作原理 第6章 モータの基礎知識 サーボモータ ステッピングモータ ●モータ(アクチュエータ)の種類と特徴 ●モータの動作原理 ●モータ制御(パワーエレクトロニクス) ソレノイド
6.1 モータとアクチュエータ モータ アクチュエータ ①原動機,蒸気機関,内燃機関など動力発生機類の総称。 ②特に電動機。 ③「自動車の,内燃機関の」などの意味で複合語をつくる(モータショー,モータオイルなど)。 アクチュエータ ①機構の制御を行うための「動き」を生みだす部品。 ②コントローラによって制御される。 ③電気で動作するもの,油圧または空気圧で動作するものがある。
(1) 産業用機械のアクチュエータ NC工作機械
(2) ロボットのアクチュエータ 実験用魚ロボット
●アクチュエータ技術を利用した機械 工事車両 産業用ロボット アミューズメントロボット 介助用機器 http://www.komatsu.co.jp/ 産業用ロボット アミューズメントロボット http://www.ecat.sony.co.jp/ 介助用機器
6.2 回転式モータの原理と特徴 ★フレミングの左手の法則に従う電磁力を利用する。 ★直流モータと交流モータは,アクチュエータ技術の基本。
(1) 直流モータと交流モータ ●アクチュエータ技術の基本は,直流モータと交流モータ。 ●それらの構造・特徴を理解する。 産業用モータ (a) 交流モータ(ACモータ) (b) 直流モータ(DCモータ「) 産業用モータ
(2) 直流モータ 直流モータの特徴 ●小型・高出力 ●電圧変化による出力制御が容易 (a) 産業用直流モータ (b) 模型用直流モータ
●直流モータの基本原理 ●永久磁石とコイル,整流子で構成される。 ●フレミングの左手の法則に従って回転する。 ●実際のモータでは,コイルを増やして,どの位置でも駆動力が得られるようにしている。
●直流モータの構造 直流モータの内部構造
●直流モータの構造 ●ケース内側に永久磁石 ●回転子に複数のコイル ●整流子とブラシで電流の方向を切り替える。
●直流モータの問題点① ブラシで発生する火花(スパーク)によってノイズが生じる。 コンデンサによるノイズ低減 コンデンサによって,端子の交流成分(ノイズ)を吸収する。
●直流モータの問題点② ブラシの摩耗により,保守が必要であり,信頼性が低い。 ブラシレスDCモータ ステータ ロータ (ネオジウム磁石内蔵) ブラシレスDCモータ ブラシをなくした直流モータも普及しつつある。
●直流モータの問題点③ マイコン等のデジタル信号による出力制御が難しい? ①専用素子や専用ドライバを使う。 ②トランジスタを使う。 次回製作
(3) 交流モータ 交流モータの特徴 ●大型化・大出力化が容易 ●構造が簡単で高信頼性 ●安価 産業用交流モータ 一般に使われているのは, 交流誘導モータ (交流インダクションモータ) 産業用交流モータ (出力400W,減速機構付き)
●交流モータの種類 交流には,三相と単相の2種類がある。 (a) 三相誘導モータ (b) 単相誘導モータ
●三相交流誘導モータの構造 固定子(コイル) 軸受 回転子
●三相交流誘導モータの基本原理 三相交流 ● 複数のコイルに120°ずつずれた三相交流電圧を入力することで回転磁界が生じ,回転力が得られる。
●単相交流誘導モータの構造 回転子 固定子(コイル) コンデンサ
●単相交流誘導モータの動作原理 ●複数のコイルで構成されている。 ●コンデンサによって,一方のコイルの位相をずらすことで,回転磁界が生じ,回転力が得られる。
●交流モータの使用例 交流モータの問題 モータ 回転数・出力制御が難しい。 モータ (a) ボール盤 (b) コンプレッサ用モータ ●産業分野や家電(扇風機や洗濯機)の汎用モータとして広く使用されている。
●交流モータの問題点① 回転数・出力制御が難しい。 汎用インバータと周辺機器 インバータによって回転数制御ができる。ただし,厳重なノイズ対策が必要。
●交流モータの問題点② 交流の電気を蓄えることはできないので,原則として商用電源が必要となる。 直流バッテリとインバータ 市販インバータ (AC100V,3kW) ディープサイクル 鉛蓄電池 (12V 60Ah×18個→10 kWh) 直流バッテリとインバータ インバータで直流を交流に変換する。
(4) モータの性能特性 直流モータの性能線図 ●電圧とトルク(負荷)によって,回転数や出力が変わる。 ●一般に,直流モータは一定電圧を与えたときの特性を表す。
●直流モータのカタログ(参考)
●直流モータのカタログ(参考)
(b) 自動車用エンジンの性能曲線(カタログ) 【補足】エンジンの性能特性 (b) 自動車用エンジンの性能曲線(カタログ) (a) エンジンの性能特性
6.3 サーボモータ ★回転角度制御・回転速度制御ができるモータ 回転速度や機械的な位置などの サーボ機構 フィードバック制御系 サーボ機構に使用するモータ またはサーボ機構を使用したモータ サーボモータ ①正確な回転が必要な場合に使用される。 ②直流モータを利用したもの,交流モータを利用したものがある。 ③駆動力が比較的大きく,ロボットのアクチュエータとしてよく利用されている。 ④制御の時間遅れが問題となることがある。
(1) R/Cサーボモータ ●回転軸の回転角度が可変抵抗によって検知される。 ●回転角度が外部からの制御信号による目標角度と一致するように制御するシステムが構成されている。
(1) 産業用サーボモータ 交流モータ ロータリエンコーダ (a) コントローラ (b) サーボモータ 産業用ACサーボモータ(200W)
(3) サーボモータの使用例 実験用水槽の造波装置(海技研) 実験用動揺装置(海技研)
●動揺台を用いた車いすの実験
●スターリングエンジン用発電機の性能評価装置 サーボモータ トルク計 IPM発電機
6.4 ステッピングモータ ★メカトロニクス機械で重要なアクチュエータ ①パルス信号を与えるごとに,一定の角度ずつ回転する。 ②正確な回転角度制御が可能である。 ③パルス周波数を変えることで,回転速度が変わる。 ④パルスモータとも呼ばれる。 ⑤限界のトルクを超えると制御できなくなる(脱調)。 ⑥回転数が高いほど,トルクが小さい。 ステッピングモータ
(1) ステッピングモータの構造 ●ケース内に永久磁石を用いた回転子 ●周囲に複数のコイル ●コイルに対して順番に電流を流す。
(2) ステッピングモータの動作原理
(3) ステッピングモータの使用例 (a) 時計 (b) OA機器
(4) ステッピングモータのマイコン回路 ステッピングモータとマイコン回路
(4) ステッピングモータのマイコン回路 マイコン回路
●ウミガメ型海中ロボット
●ウミガメ型海中ロボット
●ウミガメ型海中ロボット
●ウミガメ型海中ロボット
●ウミガメ型海中ロボット
6.5 リニアアクチュエータ ★メカトロニクス機械ではリニア運動が必要となることがある。 ロボットアーム 電動リニアアクチュエータ 介助用ベッド
回転式モータとラック・アンド・ピニオン機構を用いたリニアアクチュエータの一例 (1) 電動リニアアクチュエータ 回転式モータとラック・アンド・ピニオン機構を用いたリニアアクチュエータの一例
介助用車いすの駆動モデル(2004年度卒業研究) ●電動リニアアクチュエータの使用例 介助用車いすの駆動モデル(2004年度卒業研究)
●介助用車いすの駆動モデル
●介助用車いすの駆動モデル
(2) ソレノイド ★電磁石を機械的運動に利用したアクチュエータ ①鉄心にコイルを巻き,電流を流すと磁力が生じる。 ②電気機器の制御に使われる(リレー)。 ③簡単な機械的運動ができる。 (a) リレー (b) 小型ソレノイド
●簡単なソレノイド(電磁石) 簡単なソレノイド
(3) 油圧アクチュエータ ★大出力・大推力が必要な場合に使用される。 ①油圧エネルギーを機械エネルギーに変換する。 ②圧力差を利用して,ピストンを動かす。 ③土木機械,工作機械,建設機械のような大出力が必要な装置で使用される。 工事車両(重機)
●油圧アクチュエータの基本構成 油圧ポンプ,コントロールバルブ,油圧シリンダから構成される。
●油圧アクチュエータの動作原理 コントロールバルブの動作
6.6 まとめ ★直流モータと交流モータが基本 ★サーボモータとステッピングモータはメカトロ機械を組み上げる際に重要 ★リニアアクチュエータはメカトロ機械を組み上げる際に使いこなしたい技術 ★それぞれの特徴を把握して,モータ(アクチュエータ)を選定することが重要
【演習問題】 ★リニアアクチュエータの特徴を活かしたメカトロニクス機械を考えなさい。 その構造を図面で表し,特徴が活かされる理由を文章で説明しなさい。