視覚の幾何学 3 呉海元@和歌山大学 参考書 佐藤 淳: 「コンピュータビジョン -視覚の幾何 学-」 コロナ社
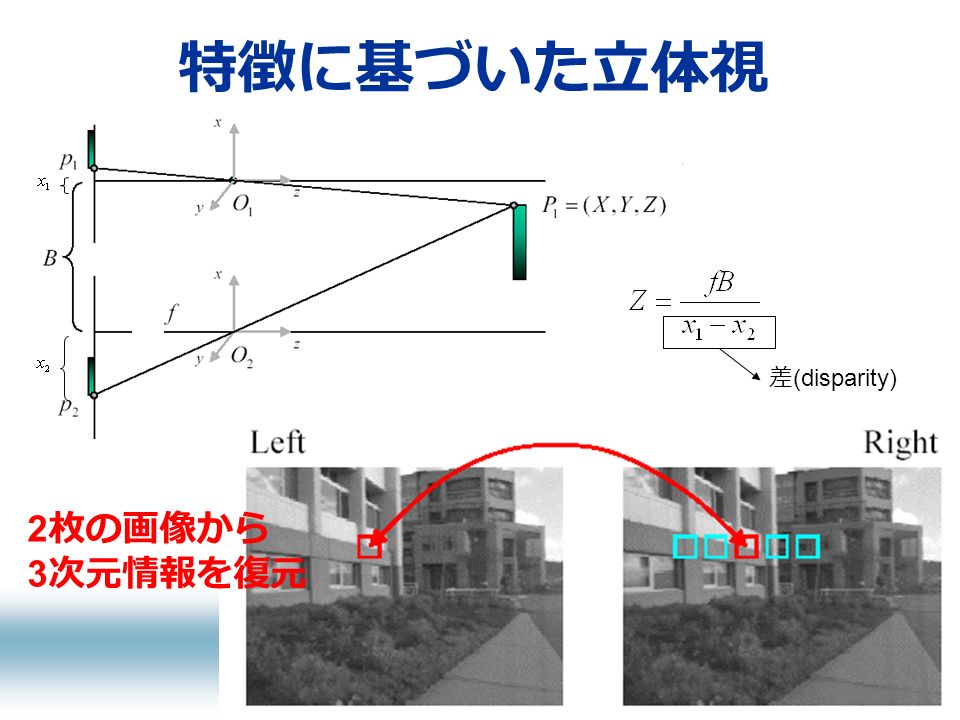
特徴に基づいた立体視 corner 差 (disparity) 2 枚の画像から 3 次元情報を復元
ボールの3D軌跡の計測 平行ステレビデオオカメラ
カメラキャリブレーション済 みなら 光軸は平行になるように変換 ( R,t が既知) 2D⇒3D p l p r P OlOl OrOr XlXl XrXr PlPl PrPr ZlZl YlYl ZrZr YrYr R, t tX’ l X l ’ = T, Y l ’ = X l ’xZ l, Z’ l = X l ’xY l ’ 立体視の原理 問題: 対応点の探索をどう絞るか?
2眼視の幾何 : Two-View Geometry courtesy of F. Dellaert x1x1 x’1x’1 x2x2 x’2x’2 x3x3 x’3x’3 画像間の点( x i to x’ i )の対応関係は ・カメラ間の剛体変換(カメラ行列) ・シーンの構造 により決定
エピボーラ幾何 (Epipolar geometry ) 複数の視点における相対的なカメラの位置や姿 勢の情報をエピポーラ幾何( Epipolar geometry )と呼ばれる画像特有の幾何によって 記述できる O O もう一方のカメラでは、 画像上のどこに投影されるのか? ?
エピボーラ幾何( Epipolar Geometry ) Baseline: カメラ中心 C, C’ を繋がる直線 Epipolar plane : baseline とシーンの中の点 X よ り決定された平面 from Hartley & Zisserman baseline エピボラ平面
エピボーラライン( Epipolar Lines ) Epipolar lines l, l’: epipolar plane と画像 面との交線 Epipoles e, e’: baseline と画像面との交点 C C’C’ from Hartley & Zisserman エピボラ平面 ベースライン Epipolar line エピボラライン Epipolar line Epipole エピホール Epipole
Epipolar Pencil X の位置を変化すると、 epipolar planes は baseline の周りに “ rotate ” このような平面集合を epipolar pencil と呼ぶ Epipolar lines は epipole から “ radiate ” これは pencil of epipolar lines と呼ぶ from Hartley & Zisserman epipolar pencil エピボラペンシール pencil of epipolar line
エピポーラ拘束 O O エピポール エピポーラ線 エピポーラ拘束
エピボーラ拘束( Epipolar Constraint ) エピボラ幾何より、片方の画像内の一点は必 ずもう一方の画像内のエピボラ直線(1D) 上存在 from Hartley & Zisserman C C’C’ x’x’ 一点 エピボラ直線
例: Epipolar Lines for Converging Cameras from Hartley & Zisserman Left viewRight view epipolar lines の交線 = Epipole ! 他方のカメラ中心の位置を表す ロボット・カメラの移動軌跡の推定
特例 : Translation Parallel to Image Plane カメラの運動が画像面と平行 する場合、 ・ epipolar lines は平行(エピホールは無限遠) ・対応点は対応 epipolar line 上に存在 ( 全種類のカメラ運 動 )
特例 : Translation along Optical Axis カメラの運動が画像平面と垂直: Epipoles は focus 延長線上に一致 一般的に、無限遠点と異なる e e’
ステレオから 3 眼視へ エピボラ幾何より、片方の画像内の一点はかなら ずもう一方の画像内のエピボラ直線(1D)上存 在 C C’C’ x’x’ 対応付け: 左側の画像上の 1 点 右側の画像上の一本の直線 点 直線 曖昧性が残っている
Transfer: epipolar transfer Using more cameras to remove match ambiguity 点点点点 点 直線
3 眼視
透視カメラのエピポーラ幾何 複数のカメラの関係や対象物との関係を考え るために、何か基準となる座標系を考えなけ ればならない(各カメラの座標系を元に考え るのではない) すべてのカメラや対象物に対して共通に決め られた座標のことをワールド座標 ( world coordinates ) と呼ぶ(ワールド座標を一つ決め る) ワールド座標を基準に考えなければならない
Coordinate Transformations 座標変換 If we want to measure something ( size of an object, depth of image points, distance between features …… ), we need to understand the geometry from image to world Coordinate system transformations Image (i) camera (c) world (w) object (o) xcxc zczc ycyc yiyi xixi xwxw zwzw ywyw xoxo zozo yoyo Oc Oi Ow Oo
行列・ベクトルの外積
幾何変換 Geometric transformation
基本行列 ( Essential matrix ) 2カメラ間の姿勢と位置: R : 3*3 rotation matrix t : 3*1 translation vector p と p’ が対応点同士なら: ⇒ 即ち :同一平面内の三つのベクトルから二つのベクトルの外 積と残るもう一つのベクトルの内積は0となる エピボラ方程式 基本行列(E行列) ★ Eが求まれば、 t とRに分解することができ る 前提: p と p’ は画像座標から計算 された物理 ( カメラ ) 座標である ( カメラの内部パラメータ既 知 )
基礎行列( Fundamental matrix ) 内部パラメータが未知、画像座標 x しか分からな い 画像座標 x と物理(カメラ)座標 p の関係: x=Kp, x’=K’p’ ⇒ p=K -1 x, p’=K’ -1 x’ ( K,K’ are the camera calibration matrix) 基本行列から : p’ T Ep=0 ⇒ x’ T K’ -T EK -1 x=0 ⇒ x’ T Fx=0 F= K’ -T EK -1 基礎行列 (F行列) ● 基礎行列はカメラの内部パラメータと外部パラ メータの双方を含んでいる
基礎行列 F の性質 1 x’ T Fx=0 x=e の場合 (e is epipole) : x’ T Fe=0, ∀ x’ ( ∵全ての epipolar lines は epipole の所に交叉 ) ⇒ Fe = 0 x’=e’ の場合 (e’ is epipole) : e’ T Fx =0, ∀ x ⇒ e’ T F = 0 ⇒ F T e’ = 0 ● F行列が与えられれば、 e と e’ はそれぞれF T F とFF T の最も小さい固有値に対応する固 有ベクトルとして求められる
片方の画像内の点 x がもう一方の画像内 epipolar line l’ 上に対応付けることは: l’ = F x この point-on-line の関係は l’ T Fx = 0 より決定 され、 l’ T Fx = (Fx) T l’ = 0 の関係も成り立 つ F is 3 x 3, rank 2 ( 逆行列が求められない) 基礎行列 F の性質 2 linepoint
ホモグラフィ( Homography ) O O もう一方のカメラでは、 画像上のどこに投影されるのか? ? 空間中の対象点が全て同一平面内に存在する場合
ホモグラフィ( Homography ) O O ホモグラ フィー
Homography x’=Hx 空間内平面と画像間の投影 ホモグラフィ行列 H の自由度: 8 一対の対応点 (x,y,1) ⇔ (x’,y’,1) より、二つの方程式が得られ る 4 組み以上の対応点 (n>=4) が分かれば、Hが唯一に決定でき る (linear in h ij )
ホモグラフィ
Homographies for Bird’s-eye Views from Hartley & Zisserman
Homographies for Mosaicing from Hartley & Zisserman
Homographies for Mosaicing 複数枚の画像より広視野の画像を合成
Applying Homographies to Removing projective distortion select four points in a plane with know coordinates (linear in h ij )
出席チェック 1.エピボーラ幾何の原理図を描き、その原 理について述べなさい